

无人机中超声波原理
军用/航空电子
描述
近年来,消费类无人机越来越受欢迎,多用于拍摄震撼的片段、运送救援物资,多数无人机使用各种传感技术实现自主导航、碰撞检测。而你又是否知道,超声波传感尤其有助于无人机着陆、悬停、地面跟踪。
无人机降落辅助是无人机所具有的一项功能,可以检测无人机底部与着陆区域的距离,判定着陆点是否安全,然后缓慢下降到着陆区域。尽管GPS监测、气压传感和其他传感技术有助于着陆过程,但在这个过程中,超声波传感是无人机的主要和最准确的判断依据。大多数无人机中还有悬停和地面跟踪模式,主要用于捕捉连续镜头和陆地导航,其中超声波传感器有助于将无人机保持在高于地面的恒定高度。
超声波原理
超声波的定义是使用高于人类听力上限频率的声波 —— 见图1。

图1:超声波范围
超声波可以穿过各种介质(气体、液体、固体)来检测声阻抗不匹配的物体。声速是声波在弹性介质中传播时每单位时间的距离。例如,在20°C (68°F)的干燥空气中,声速为343米每秒(1,125英尺每秒)。空气中的超声波衰减随着频率和湿度的增加而增加。因此,由于过度的路径损耗/吸收,空气耦合超声波通常被限制在500kHz以下的频率。
超声波ToF
与许多超声波传感应用一样,无人机着陆辅助系统使用飞行时间(ToF)原理。ToF是从传感器发射到目标物体,然后从物体反射回传感器的超声波的往返时间估计,如图2。

图2:用于无人机着陆的超声波ToF示意图
在图2和图3中的点1,无人机的超声波传感器发出声波,在返回信号处理路径上表示为饱和数据。发送后,信号处理路径变为静音(点2),直到回波从物体反射回来(点3)为止。
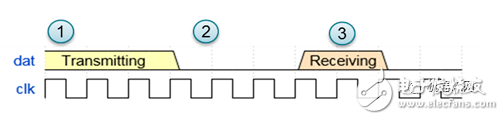
图3:超声波ToF的相位
公式1计算从无人机到地面或从无人机到另一个物体的距离:
距离(d)是从无人机上的超声波传感器到地面/物体的距离,ToF(t)是前面定义的ToF,而SpeedOfSound(v)是通过介质的声速。ToF(t)×SpeedOfSound(v)除以2,因为ToF计算超声回波往返物体的时间。
为什么要将超声波感应用于无人机着陆?
虽然众多的传感技术可以检测物体的接近程度,但是超声波传感可在无人机着陆时的探测距离、方案成本以及不同表面的可靠性方面良好运行。
无人机地面跟踪和着陆的共同要求是能够可靠地检测到距离地面5米高的距离。假设信号调节和处理正确,40-60kHz范围内的超声波传感器通常可以满足这个范围。
德州仪器的PGA460是超声波信号处理器和传感器驱动器,用于无人机等空气耦合应用中的超声波传感,可达到或超过5米的要求。然而,超声波传感的协调是物体近场检测中的限制。所有用于空气耦合应用的超声波传感器都有一段激励期,称为衰减时间或振荡时间,在这个时间内,压电薄膜振动并发出超声波能量,难以检测到任何进入的回波。
为了在振铃期间有效地测量物体,许多无人机设计者为发射机和接收机安装单独的传感器。通过分离接收器,无人机可以在发射器的激励期间检测物体。因此PGA460具有优越的近场检测性能——低至5cm或更少。
超声波传感技术也是一项具有成本竞争力的技术,特别是在使用PGA460等集成解决方案时,其中已包括大部分所需的芯片。PGA460既可以使用半桥或H桥直接驱动传感器,也可以使用变压器驱动传感器;后者主要用于密封的的“密闭”传感器。PGA460还包括用于接收和调节超声回波的完整模拟前端。此外,该器件还可以通过数字信号处理来计算ToF(见图4)。
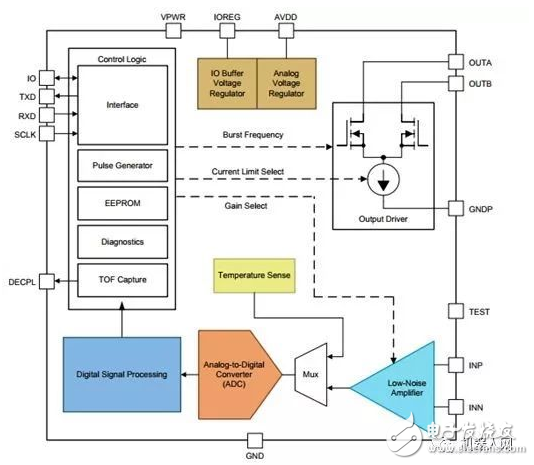
图4:PGA460 功能框图
超声波传感可以检测其他技术难以解决的的表面。例如,无人机经常会遇到建筑物上的玻璃窗和其他玻璃表面。光传感技术有时会穿过玻璃和其他透明材料,这对无人机悬停在玻璃建筑物上造成困难。超声波则能够可靠地反射出玻璃表面。
虽然超声波传感主要用于无人机着陆辅助和悬停,但其强大的性价比正促使无人机设计人员探索该技术的其他应用。快速发展的无人机领域潜力巨大。
-
超声波传感可用于无人机应用的原因2022-11-11 970
-
无人机云台是什么2021-09-01 10602
-
无人机云台电机是什么电机?2021-05-25 4386
-
超声波传感应用于无人机着陆技术解析2020-02-21 3062
-
超声波感应器的用处2019-07-24 1944
-
超声波感应器用于无人机应用的原因2019-03-18 2203
-
超声波传感器在无人机领域中的作用2018-11-13 4701
-
超声波测距在无人机上会出现偶尔测不到的情况2018-10-24 3836
-
用于室内或室外的无人机超声波传感器2018-08-24 2751
-
无人机超声波互相干扰问题2018-05-10 5627
-
无人机超声波传感器在无人机避障中的应用2018-01-25 15095
-
超声波感应器如何完美应用在无人机中?2018-01-07 9719
-
超声波传感器在无人机和汽车安全驾驶的应用2017-12-13 3065
-
为什么要将超声波传感器用于无人机设计?2017-12-12 10320
全部0条评论

快来发表一下你的评论吧 !
