

什么是步进电机?步进电机的种类
伺服与控制
描述
什么是步进电机?
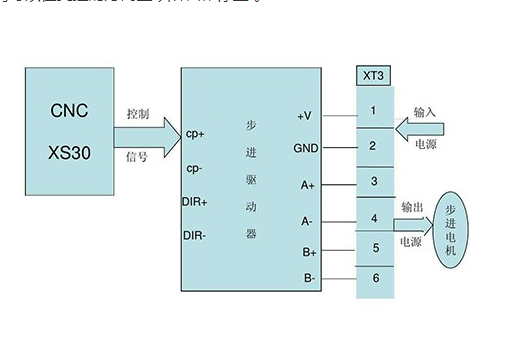
文名称:步进电动机 英文名称:stepping motor 定义:将电脉冲信号转换成相应的角位移或线位移的控制电动机。 所属学科:机械工程(一级学科);仪器仪表元件(二级学科);仪表电机(三级学科) 步进电动机是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。 简介 步进电动机(stepping motor) 步进电动机把电脉冲信号变换成角位移以控制转子转动的微特电机。在自动控制装置中作为执行元件。每输入一个脉冲信号,步进电动机前进一步,故又称脉冲电动机。步进电动机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。 步进电动机的驱动电源由变频脉冲信号源、脉冲分配器及脉冲放大器组成,由此驱动电源向电机绕组提供脉冲电流。步进电动机的运行性能决定于电机与驱动电源间的良好配合。
步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
步进电机可以看作没有换向器的电动机。典型地,电动机中的所有绕组都是定子的一部分,并且转子可以是永磁体,或者在可变磁阻电机的情况下,可以是一些软磁材料的齿块。所有的换向必须由马达控制器在外部进行处理,通常,马达和控制器被设计成使得马达可以保持在任何固定的位置以及单向或双向旋转。大多数步进器,因为它们也是已知的,可以在音频上步进,允许它们快速旋转,并且使用合适的控制器,它们可以在受控的方向上“开始”和“停止”。
对于某些应用,可以选择使用伺服电机和步进电机。两种类型的电机都提供了类似的精确定位机会,但它们在许多方面有所不同。伺服电机需要某种类型的编码器反馈控制系统。通常,这涉及光学或磁性编码器以提供关于转子位置的反馈,以及电路的一些混合,以通过电动机驱动电流,与期望位置和当前位置之间的差异成反比。
在步进和伺服之间进行选择时,必须考虑一些问题。比如用步进电机进行定位的重复性取决于电机转子的几何形状,而用伺服电机进行定位的重复性通常取决于编码器和反馈电路中其他部件的稳定性。
步进电机可用于简单的开环控制系统; 这些通常适用于在静态载荷下以低加速度运行的系统,但是闭环控制对于高加速度来说可能是必不可少的,特别是如果它们涉及可变载荷的话。如果开环控制系统中的步进电机过载,则转子位置的所有知识都将丢失,系统必须重新初始化; 伺服电机不受此问题的困扰。
步进电机也可用于闭环系统,与伺服系统类似,增加了编码器和反馈驱动电路。性能得到提高,但需要额外的成本。
步进电机有两种类型,永磁体和可变磁阻(也有混合电机,从控制器的角度来看与永磁电机没有区别)。如果缺少电机上的标签,通常在没有电源的情况下,可以通过感觉来分辨两者。当你用手指扭动转子时,永磁电动机倾向于“齿轮”,而可变磁阻电动机几乎可以自由旋转(尽管由于转子中的剩余磁化,它们可能会轻微地转动)。你也可以用欧姆表来区分这两个品种。可变磁阻电动机通常有三个(有时是四个)绕组,有共同的回路,而永磁电动机通常有两个独立的绕组,有或没有中心抽头。
步进电机具有广泛的角度分辨率。最粗糙的电机通常每步旋转90度,而高分辨率的永磁电机每步通常可以处理1.8或甚至0.72度。使用合适的控制器,大多数永磁体和混合电机可以半步运行,一些控制器可以处理更小的步数或微步。
对于永磁电机和可变磁阻步进电机,只要电机的一个绕组通电,转子(空载)就会锁定在一个固定角度,然后保持该角度,直到转矩超过电机的保持转矩哪一点,转子会转动,试图保持在每个连续的平衡点。
步进电机的种类
按力矩产生的原理分为反应式和激磁式(目前我国使用的大都是反应式)
反应式:转子无绕组,由被激磁的定子产生反应力矩实现步进运行
激磁式:定,转子均有激磁绕组(或转子用永久磁钢),由电磁力矩实现步进
按输出力矩大小分为伺服式和功率式
伺服式:输出力矩在百分之几至十分之几(N*M)只能驱动较小的负载,要与液压所知放大器配用,才能驱动机床工作台等圈套的负载
功率式:输出力矩在5-50N*M以上,可以直接驱动机床工作台等圈套的负载
按定子数分为单定子式,双定子式,三定子式,多定子式
按各相绕组分布分为径向分布式,轴向分布式
径向分布式:电机各相按圆周依次排列
轴向分布式:电机各相按轴向依次排列
-
行星减速步进电机与步进电机的区别2024-11-16 1972
-
步进电机型号与步进电机命名规则2024-08-26 3146
-
步进电机工作原理 步进电机和伺服电机的区别2024-01-22 2199
-
步进电机原理介绍2023-03-21 894
-
什么是步进电机 步进电机的结构2023-03-09 3116
-
步进电机的惯量选择_步进电机惯性大怎么解决2023-03-08 6972
-
步进电机的种类 步进电机的步距角是什么2023-03-03 9604
-
步进电机的结构2023-02-24 4004
-
什么是步进电机?驱动步进电机又是什么2021-07-07 1367
-
步进电机的选择方法-电机种类的选择2021-06-28 1962
-
步进电机都有哪些分类?反应式步进电、永磁式步进电机、混合式步进电机各有什么特点?2020-12-26 6004
-
步进电机的种类,特点及选择2010-06-03 3041
-
步进电机分哪几种及种类2010-01-09 7177
全部0条评论

快来发表一下你的评论吧 !
