

无人驾驶系统的软件架构是怎样的
汽车电子
2450人已加入
描述
一、整体架构
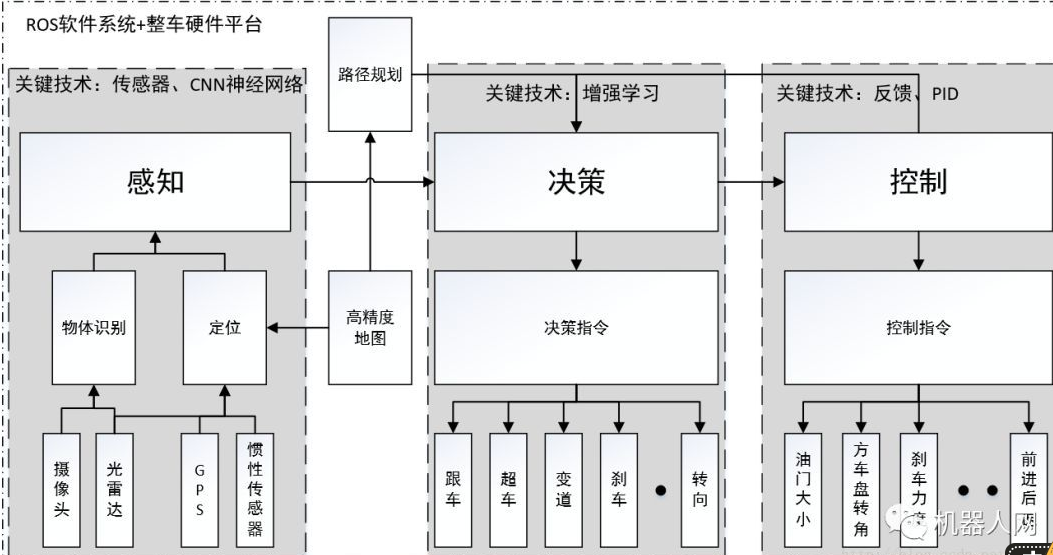
基于本人对无人驾驶系统的理解,对无人驾驶系统的软件架构进行分层,大致分别以下3层:感知层、决策层与控制层。
二、感知层
感知层主要是通过各种传感器以及高精度地图实现,包含车辆的定位以及对物体的识别。 车辆的定位主要是通过光雷达(LiDar)、GPS、惯性传感器、高精度地图等等信息进行综合,从而得出车辆的准确位置,其定位精度甚至可达cm级别; 物体的识别主要采用光雷达以及双目摄像头实现;
三、决策层
决策层的输入包括感知层的信息、路径的规划以及控制层反馈回来的信息,通过增加学习算法下发决策指令。决策指令包含:跟车、超车、加速、刹车、减速、转向、调头等等;
四、控制层
根据决策层下发的指令,控制层对车辆实施具体的控制,其中包括:油门的控制、刹车的控制、方向盘的控制以及档位的控制;
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何实现无人驾驶硬件平台的设计?2021-11-02 3656
-
介绍无人驾驶硬件平台设计2021-09-09 2864
-
无人驾驶汽车的工作原理是什么?2021-06-28 5726
-
无人驾驶分级及关键技术2021-01-21 3305
-
无人驾驶汽车的关键技术是什么?2020-03-18 4880
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 6950
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 7021
-
无人驾驶与自动驾驶的差别性2017-09-28 6596
-
无人驾驶电子与安全2017-02-22 4925
-
【话题】无人驾驶汽车,真的要来了么?2016-06-24 10462
-
谷歌欲在英国首推无人驾驶汽车2015-12-14 3133
-
百度无人驾驶车北京完成路测2015-12-12 2824
-
无人驾驶导航平台2014-11-11 9727
全部0条评论

快来发表一下你的评论吧 !
