

机器人手臂的典型机构有哪些
人工智能
描述
一般机器人手臂有3个自由度,即手臂的伸缩、左右回转和升降 (或俯仰)运动。手臂回转和升降运动是通过机座的立柱实现的,立柱的横向移动即为手臂的横移。手臂的各种运动通常由驱动机构和各种传动机构来实现。手臂的 3 个自由度,可以有不同的运动 (自由度)组合,通常可以将其设计成如图 2-34 五种形式。
① 圆柱坐标型
如图 2-34(a)所示,这种运动形式是通过一个转动,两个移动,共三个自由度组成的运动系统,工作空间图形为圆柱形。它与直角坐标型比较,在相同的工作空间条件下,机体所占体积小,而运动范围大。
② 直角坐标型 如图 2-34(b)所示,直角坐标型机器人,其运动部分由三个相互垂直的直线移动组成,其工作空间图形为长方体。它在各个轴向的移动距离,可在各坐标轴上直接读出,直观性强,易于位置和姿态的编程计算,定位精度高、结构简单,但机体所占空间体积大、灵活性较差。
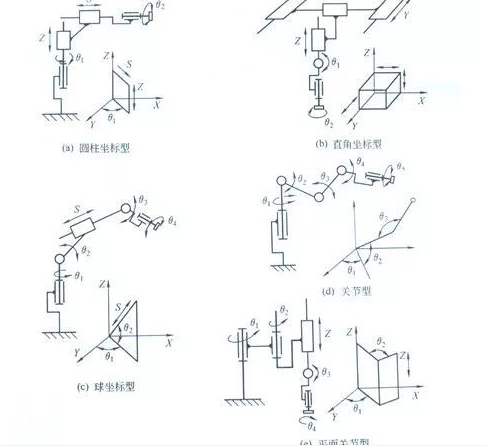
③球坐标型 如图 2-34(c)所示,又称极坐标型,它由两个转动和一个直线移动所组成,即一个回转,一个俯仰和一个伸缩运动组成,其工作空间图形为一球体,它可以作上下俯仰动作并能够抓取地面上或较低位置的工件,具有结构紧凑、工作空间范围大的特点,但结构轻复杂。
④关节型 如图 2-34(d)所示,关节型又称回转坐标型,这种机器人的手臂与人体上肢类似,其前三个关节都是回转关节,这种机器人一般由立柱和大小臂组成,立柱与六臂同形成肩关节,大臂与小臂间形成肘关节,可使大臂作回转运动θ1和使大管作俯仰摆动θ2,小臂作俯仰摆动θ3。其特点是工作空间范围大,动作灵活,通用性强,能抓取靠近机座的物体。
⑤平面关节型 如图 2-34(e)所示,采用两个回转关节和一个移动关节;两个回转关节控制前后、左右运动,而移动关节则实现上下运动,具工作空间的轨迹图形,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体横截面的大小、形状、这种形式又称为SCARA型装配机器人。 结合P29-30的图选讲其中一个工作原理。
机器人手臂的典型机构
(1)手臂直线和回转运动机构
机器人手臂的伸缩、横向移动均属于直线运动。实现手臂往复直线运动的机构形式比较多,常用的有活塞油(汽)缸、齿轮齿条机构、丝杠螺母机构以及连杆机构等。因为活塞油(汽)缸的体积小、重量轻,在机器人的手臂结构中得到的应用比较多。
(2)手臂俯仰运动机构
机器人手臂的俯仰运动一般采取活塞油(汽)缸与连杆机构联用来实现。手臂的俯仰运动用的活塞缸位于手臂的下方,其活塞杆和手臂用铰链连接,缸体采用尾部耳环或中部销轴等方式与立柱连接。
-
如何创建FPGA控制的机器人手臂2023-10-24 2894
-
用于Arduino Due的DIY Braccio机器人手臂护罩2023-06-14 1312
-
Arduino机器人手臂2022-12-30 885
-
机器人手臂使用哪种型号的泰和承比较合适2022-03-17 1140
-
中国科大展示软体机器人手臂在日常生活中的巨大应用潜力2021-04-13 4117
-
Arduino与树莓派打造Chatbot语音控制机器人手臂2021-03-16 1434
-
Hibot机器人手臂Float Arm可用于哪些应用环境2020-04-20 7838
-
在未来机器人手臂将可以替代人类的双手2019-09-17 2543
-
怎样使用Android手机的蓝牙控制机器人手臂2019-07-29 9776
-
STM32的医疗康复机器人手臂控制系统2018-08-22 4563
-
关于蓝牙控制Atmel制造的机器人手臂的介绍2018-07-09 4254
-
机器人手臂5种不同的运动组合2018-04-18 19973
-
机器人的主要技术参数2017-08-15 7565
-
工业机器人手臂快速碰撞检测算法2017-02-07 1018
全部0条评论

快来发表一下你的评论吧 !
