

nRF24L01无线模块通过串口通信的功能实现控制LED灯的设计
接口/总线/驱动
描述
这是在上一个的基础上通过按键发送4种不同命令来控制接收端的LED灯亮的改进版,这里俺把按键发命令给去掉,然后加入一个串口通信的功能,PC通过串口给发送端发送命令,然后发送端通过无线将命令发给接收端来实现控制,这里接收端和上一个例程中的一样,只是在发送端的代码里去除了按键控制,变成了串口控制。

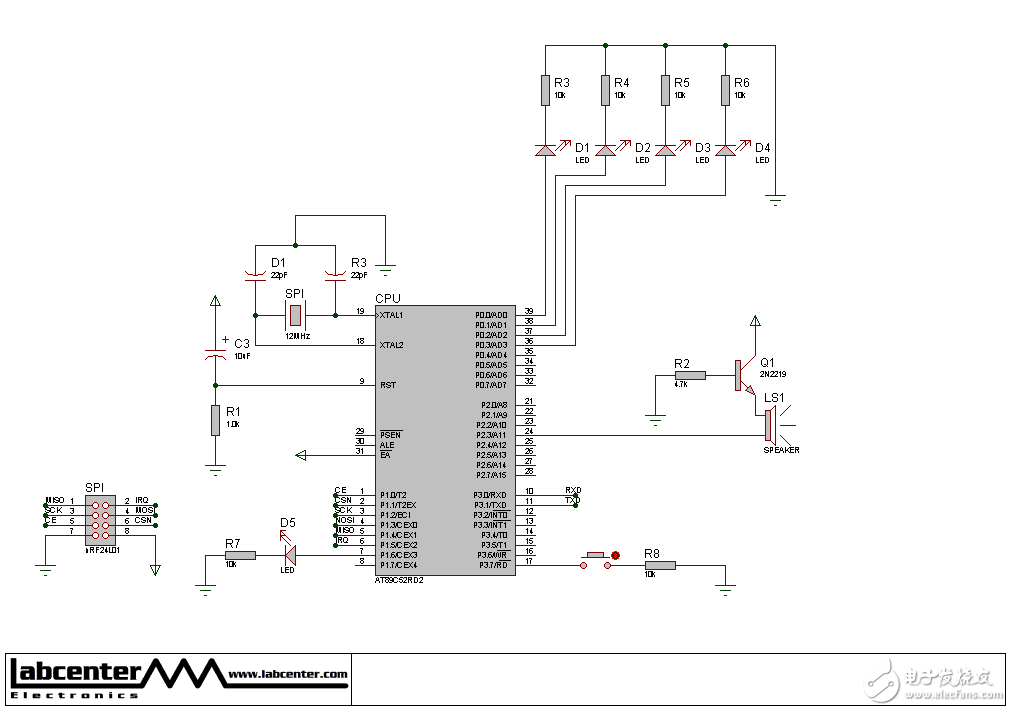
由于这里的接收端的代码和上一个一样,所以不做介绍(惜墨如金呀,哈哈~~),下面就发送端进行介绍:
1 /*------------------------------------------------
2 定义UART_Init函数
3 ------------------------------------------------*/
4 void UART_Init(void)
5 {
6 SCON = 0x50; // 设定串行口工作方式,8位数据位,允许接收
7 T2CON = 0x34; //设置定时器2,作为波特率发生器
8 RCAP2L = 0XDC; //9600波特率的低8位
9 RCAP2H = 0XFF; //9600波特率的高8位
10 ES = 1; //允许串口中断
11 EA = 1; //允许总中断
12 }
这里是串口初始化函数,采用定时器2作为波特率发生器,允许串口中断(我采用发送就是循环发送策略,而接受通过触发中断来改变标志符,在主函数里再判断标志符来判断是否收到数据。)
1 /*------------------------------------------------
2 定义UART_Send_Byte函数
3 ------------------------------------------------*/
4 void UART_Send_Byte(uchar byte)
5 {
6 SBUF=byte; //缓冲区装载要发送的字节数据
7 while(TI==0); //等待发送完毕,TI标志位会置1
8 TI=0; //清零发送完成标志位
9 }
这是我定义的一个发送一个字符的串口发送函数,大致意思就是把待发送数据给SBUF,然后等待标志位TI为1,即发送完毕,最后别忘清0!
1 /*------------------------------------------------
2 串口接收中断服务程序
3 ------------------------------------------------*/
4 void UART(void) interrupt 4
5 {
6 if(RI) //检测接收完成标志位置1
7 {
8 RI=0; //清零接收完成标志位
9 a=SBUF; //读取接收到的数据
10 uart_flag = 1; //中断标志位置1
11 }
12 }
上一个函数负责发送,这一个是负责接收的函数,对的,这里采用的是串口接收中断,当触发串口中断时,判断是否RI为1,即接收完成与否,如果接收完成就把缓冲SBUF中的数据给全局变量a,然后置接收标志uart_flag为1,并RI清0.
1 /*------------------------------------------------
2 main函数
3 ------------------------------------------------*/
4 void main()
5 {
6 LED6=1; //初始灯6熄灭
7 uart_flag=0; //串口标志初始为0
8 init_NRF24L01(); //初始化24L01
9 UART_Init(); //初始化串口
10
11 while(NRF24L01_Check()) //检查不到24l01则报警
12 {
13 beep=0;
14 delay_ms(200);
15 beep=1;
16 delay_ms(200);
17 }
18 while(1)
19 {
20 RX_Mode(); //接收模式
21 while(!nRF24L01_RxPacket(Rx_Buf)) //等待接收数据,返回1则接收到数据,在等待接收数据期间,可以随时变成发送模式
22 {
23 if(uart_flag==1) //当串口接受标志为1表示有数据过来
24 {
25 ES=0; //关串口中断
26
27 TX_Mode(); //发送模式
28 Tx_Buf1[0]=a-‘0’; //将串口数据给发送缓冲区
29 nRF24L01_TxPacket(Tx_Buf1); //发送命令数据24L01
30 UART_Send_Byte(‘O’); //向串口发送已经传送
31 UART_Send_Byte(‘K’);
32 UART_Send_Byte(‘:’);
33 UART_Send_Byte(a);
34 UART_Send_Byte(‘\n’);
35 LED6=0;
36 delay_ms(300);
37 LED6=1;
38 delay_ms(300); //发送后LED1闪一下
39
40 ES=1; //允许串口中断
41 uart_flag=0; //中断标志位置0
42 break; //退出最近的循环,从而变回接收模式,这句关键
43 }
44 }
45 if(Rx_Buf[0]==1) //若接收到对应的数据则实现对应功能
46 {
47 Rx_Buf[0]=0; //清空数据
48 LED6=0;
49 delay_ms(300);
50 LED6=1;
51 delay_ms(300); //接收到数据 后闪烁
52 }
53 }
54 }
主函数中先初始化串口和24L01,然后检测24L01是否存在,若不存在就响铃,接着进入主循环,设置24L01为接收模式,循环检测是否收到数据,如果收到数据直接跳到第45行对信息处理作出相应动作,如果没有收到数据就一直执行循环体内的代码,循环体内不断检查uart_flag是否为1,即是否收到了数据,当收到了数据就关闭串口中断,将收到的数据发送出去,并回复PC端,并使LED6闪烁一次。【PC端为1,2,3,4】
》_
l 如果24L01用reg51那么两个设备都要用reg51,如果用reg52就都得用reg52!
l PC通过串口发送给单片机命令[相当于协调器],单片机把命令通过24L01无线发送给另一个单片机,另一个单片机控制灯LED1,LED2,LED3,LED4闪烁。
-
使用NRF24L01模块无线控制的自动窗帘2022-07-18 1016
-
STM32单片机的NRF24L01无线通信模块如何使用?2020-06-16 3030
-
nRF24L01无线通信模块怎么使用2021-12-03 1550
-
基于nRF24L01的通用无线通信模块设计2016-01-04 1103
-
基于nRF24L01的数据无线传输系统的设计与实现2016-01-06 1329
-
NRF24L01无线模块_2.4G无线通信模块_24L01+升级2016-06-21 1564
-
nRF24L01无线通信模块使用手册122016-12-10 1151
-
nrf24l01无线模块传输距离分析2017-12-15 37030
-
nRF24L01无线2.4G通信模块的详细研究资料说明2019-05-29 2677
-
使用51单片机实现NRF24L01无线模块的串口通信详细资料说明2021-03-01 1647
-
nRF24L01无线模块笔记2021-11-20 1415
-
nRF24L01无线通信模块使用简介2021-11-23 2198
-
使用nRF24L01模块进行无线射频通信2022-08-01 6644
-
NRF24L01无线通信介绍2023-05-30 1347
-
基于nRF24L01的通用无线通信模块设计案例2023-11-06 861
全部0条评论

快来发表一下你的评论吧 !
