

鼠笼式异步电动机正反转实例
伺服与控制
描述
鼠笼式异步电动机正反转实例控制解析
在生产过程中,作为我们维修电工经常接触到的生产机械要求运动部件频繁正反向运转。
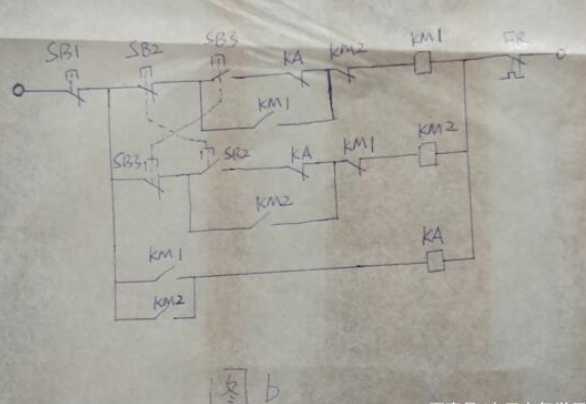
下面介绍两个控制电路来逐一分析。在图a中,采用了按钮和接触器双重联锁的控制电路,该线路利用了正反转接触器的常闭辅助触点进行联锁的基础上,增加了复合接钮SB2和SB3。进行联锁保护。这种电路中,即使同时接下两个启动接钮,正反转接触器都不能得电。此外,使用了复合按钮,电动机正向运转后,不必先按下停止接钮SB1,可以直接按反向启动按钮使电动机反向运转。
在实际生产过程中,如果操作频繁,正反向接触器仍有可能同时接通。为了避免正反向接触器同时吸合,可在控制线路中添加一只中间继电器kA,以延长转换过程。如图b所示。另外一些场合可以酌情选用专用机械联锁接触器。
三相鼠笼式异步电动机正反转控制实验报告
在电机教学过程中,有不少学生问到单相电动机正反转控制的问题,下面就电容式单相异步电动机正反转控制方法和大家进行探讨。
一、单相电动机工作原理
理论上的单相交流电动机只有一个绕组.转手是鼠笼式的。当单相正弦电流通过定子绕组时.电动机就会产生一个交变磁场,这个磁场的强弱和方向随时间作正弦规律变化,但在空间方位上是固定的.所以又称这个磁场是交变脉动磁场。这个交变脉动磁场可分解为两个以相同转速、旋转方向互为相反的旋转磁场,当转子静止时,这两个旋转磁场在转子中产生两个大小相等、方向相反的转矩,使得合成转矩为零,所以电动机无法旋转。当用外力使电动机向某一方向旋转时(如顺时针方向旋转).这时转子与顺时针旋转方向的旋转磁场间的切割磁力线运动变小,转子与逆时针旋转方向的旋转磁场间的切割磁力线运动变大。这样平衡就打破了,转子所产生的总的电磁转矩将不再旋转起来。要使单相电动机能自动旋转起来,可在定子中加上一个起动绕组,启动绕组与主绕组在空间上相差90度,启动绕组(副绕组)要串接一个合适的电容.使得似相差90度.即所谓的分相原理。这样两个在时间上相差90度的电流通人两个在空间上相差90度的绕组,将会在空间上产生(两相)旋转磁场,这样在定子里就产生了旋转磁场,其旋转磁场为顺时针方向。在这个旋转磁场作用下,转子就能自动启动,启动后,待转速升到一定时,借助于一个安装在转子上的离心开关或其他自动控制装置将启动绕组断开,正常工作时只有主绕组工作。因此。启动绕组可以做成短时工作方式。但有很多时候,启动绕组并不断开,称这种电动机为电容式单相电动机。
二、单相电动机正、反转原理
异步电动机的旋转原理是在定子绕组中形成一个旋转磁场,旋转磁场的方向决定了电动机的转向。
只要改变旋转磁场的方向,就能改变电动机的旋转方向。三相电动机只要改变相序,就能改变旋转磁场的方向,从而也改变了三相电动机的正、反转。而单相电动机是通过分相元件、电容或线圈本身的电阻,将单相电分为相差小于900的两相电,其中主绕组上的代表一相电,副绕组上的代表另一相电。
所以,单相电动机实质是“二相电动机”。要改变单相电动机的转向,可以通过改变相序来改变,不过这里和三相电动机不一样,并不是改变电源相序,而是要改变主副绕组中电流桕序。而要改变主副绕组电流中相序可以通过两种方式来进行.一是改变主副绕组的阻抗.由电容器串接在主副绕组不同的位置来实现。二是更换主或副绕组的极性来达到改变电流相序。下面以两种典型用途的单相电动机为例来说明。
1.单相洗涤电机正反转方式
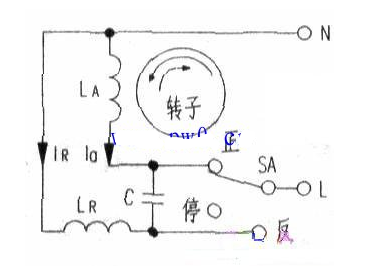
单相洗涤电机工作要求主副绕组参舯一致,电动机正,反转出力一样,主副绕组可以互为工作绕组。单相电动机经过主副绕组分相形成旋转磁场。主副绕组两者相差900相角。主绕组直接和I.、N相连,副绕组则串联电容后与电源相连。设流过主绕组的电流为la.流过副绕组的电流为IR。主绕组基本是电感,阻抗为感抗,是感性负载,la在相位上滞后电源电压。而副绕组由于串联电容后,阻抗将减小,与电源的相角也将减小。所以IR比la超前一个相角,只要选择合适的电容,就可以使IR超过la90度这样由两相电流产生相位差并形成正向旋转磁场,使电动机正转。同理,若这时将副绕组直接和L、N相连,主绕组串联电容后与电源相连。
则Ia比IR超前90。相角,形成反向旋转磁场使电动机反转。电路示意图如下图,用一个单刀三掷开关来负责切换电容器接入主副绕组的位置。刀闸处于中间位置为停止状态。正转时,绕组LA直接接LN,绕组LR和电容串联,绕组LR为启动绕组,电流超前,设为正向转动。那么改换接法,绕组LR直接接LN,绕组LA和电容串联,绕组lA为启动绕组,电流超前,则反向转动。从上面分析也可以看出,主副绕组也可以互为启动绕组的。
2.单相电刨电机正反转方式
单相电刨电机工作要求主副绕组参数不一致,电机正、反转出力也不一样,主绕组是工作绕组。很显然这种类型电机不能采用上述方法使电机实现反转。但由上面的分析知道,副绕组串接电容,产生IR超过la900的相位差并形成旋转磁场,使电机正转。那么只要让IR滞后于la90度(或者换句话说,让la超前IR90。)。
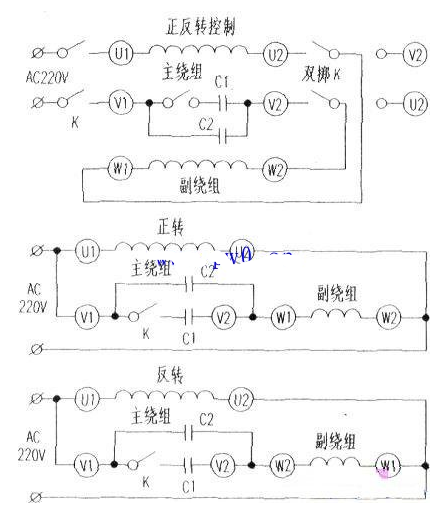
就可以让电机实现反转。要实现这个很简单.只要IR翻转180度(或者la翻转180。)就能实现了。那么如何实现IR翻转180度(或者la翻转180a)呢?从下面的接线图上可以看出,实际上主绕组同副绕组是接在同~个电源上的,也就是说他们的电压是同相位的。那要是把副绕组的L接Wl及N接W2换一下,改成L接W2及N接W1,主绕组不变.维持LN接UIU2。那么主绕组的电压和副绕组的电压就有180度的相位差.也就是说副绕组的电流也翻转了180度。这时就实现了IR滞后于Ia90度(或者换句话说,让Ia超前IR90度)。旋转磁场的方向为逆时针,实现了反转。
在实际的电路中副绕组和电容是通过顺逆开关和电源相连的。这个电路改变的不是电容接入哪个绕组,而是绕组的接人极性。理论上要想改变单相电动机的转向,可以改变主、副绕组的连接形式,将主绕组头尾对调,或将副绕组的头尾对调.即可改变单相电动机的旋转方向。由于主绕组的电流比副绕组的电流大得多,所以一般采用改变副绕组的接线来改变单相电动机的旋转方向。电机工作时,旋转磁场的转向总是从电流超前的绕组转向电流落后的绕组,若将其中~个绕组的接线端对调一下,就改变了该绕组的电流相位使之反相,由超前(落后)变为落后(超前).旋转磁场的转向就随之改变。电路示意图如下图.用一个双刀双掷开关来负责切换主副绕组接入极性。正转时,主绕组UI、U2直接接LN,副绕组经开关Wl和L相接.W2和N相接,副绕组为启动绕组,电流超前,设为正向转动。那么改换接法,主绕组Ul、U2依然直接接LN,副绕组经开关W2和L相接.W1和N相接,副绕组仍为启动绕组,电流滞后,则反向转动。从上面分析可以看出,副绕组始终为启动绕组。
-
绕线式异步电动机的起动2018-10-15 2780
-
鼠笼式异步电动机正反转实例控制解析2020-09-06 1504
-
单相异步电动机和三相异步电动机的维护有何不同2021-03-03 3283
-
PLC控制三相异步电动机正反转系列2021-06-28 1921
-
异步电动机正反转PLC控制的编程步骤及方法是什么?2021-06-29 2601
-
异步电动机的matlab建模与仿真2021-09-03 2082
-
对异步电动机的仿真2021-09-06 1652
-
异步电动机的正反转控制2008-11-03 1344
-
三相异步电动机Y/Δ换接启动及正反转控制2008-09-29 30134
-
异步电动机正反转及星角转换2017-03-20 1460
-
单相异步电动机正反转电路图2019-12-19 28687
-
单相异步电动机和三相异步电动机的维护有什么不同?2020-12-14 2364
-
异步电动机按照转子结构2022-02-23 9012
-
绕线式异步电动机与鼠笼式电机的区别2023-03-28 12176
-
三相异步电动机正反转控制的原理图2023-05-31 5872
全部0条评论

快来发表一下你的评论吧 !
