

机械手内部是什么样的吗?部位结构种类分析
描述
机械手模型
说到机械手,大家脑海里呈现的应该是上面图片所示的样子。
那么,机械手内部到底是什么样的,有什么奥秘吗?下面和大家分享一下气动机械手的主要结构。
一、机械手各部位结构
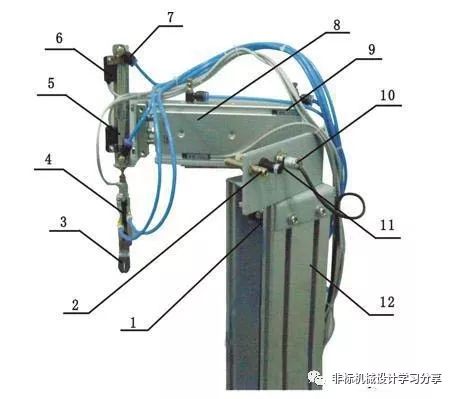
机械手各部位结构
1. 摆动气缸 2. 定位螺栓 3. 气动手爪 4、6、9. 磁性开关 5. 标准气缸 7. 节流阀 8. 双联气缸10. 接近开关 11. 缓冲阀 12. 支架
机械手由多个连杆和关节组成。机械手一般由底座、执行机构,如夹钳、吸盘等,以及它们之间的关节和连杆组成,机械手能够在其活动范围内,实现任意运动和转向,我们一般把活动的关节称为自由度。
二、气路元件

气路元件种类
气动机械手涉及到的气路元件主要有摆动气缸、双联气缸、笔型气缸和气源处理组件等。
气源处理组件
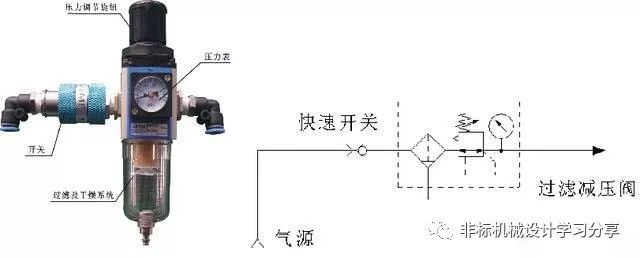
气源处理组件
气源处理组件由压力调节过滤器、进气开关以及弯头构成。其气源由空气压缩机提供,压力范围在0.6~1.0MPa,之间,输出压力是0~0.8MPa,可以调节。输出的压缩空气送到各工作单元。
笔型气缸
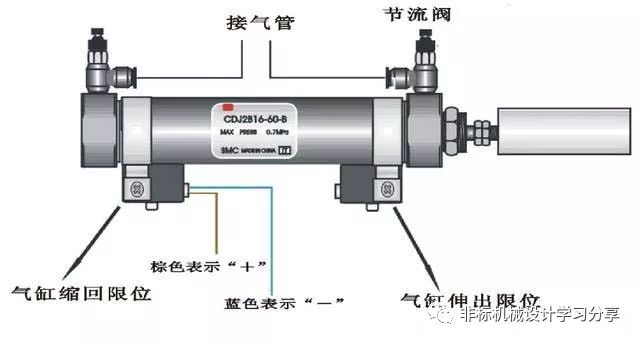
笔型气缸
通过气缸往复运动把物料被送到相应位置。如果进出气的方向变化,气缸的运动方向也会随之变化。气缸两侧的磁性开关主要用来跟踪气缸是否已经运动到指定位置。
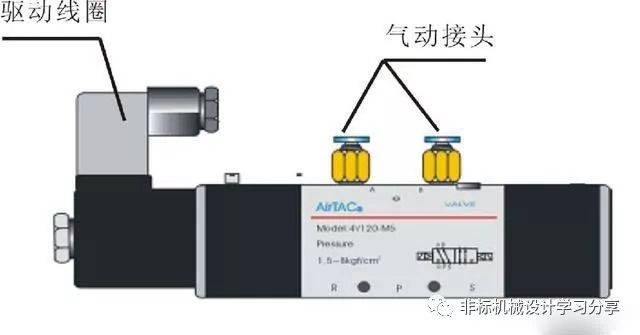
双线圈电磁阀
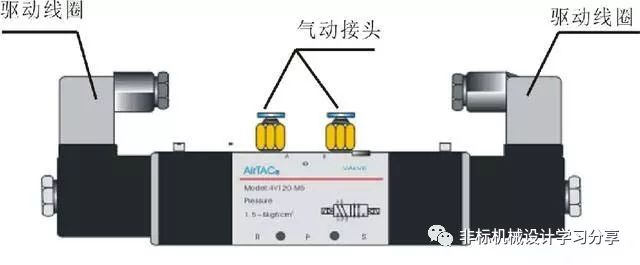
双线圈电磁阀
双线圈电磁阀主要是控制气缸进、出气,实现气缸的伸缩运动。要注意红色指示分灯正负极,如果正负极接反,也可以工作,但是指示处于关闭状态。
单线圈电磁阀
单线圈电磁阀
单线圈电磁阀控制气缸的单方向运动,实现伸缩运动。与双线圈电磁阀的不同在于,双线圈电磁阀初始位置不固定,能够任意控制两个位置,而单线圈电磁阀初始位置是固定的只可以控制其中一个方向。
气动元件动作分析
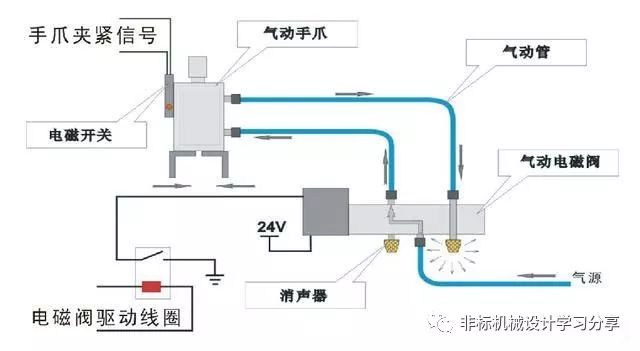
手爪控制示意图
三、主要传感器
机械手通过感知器的内部传感器检测本身的状态,如速度、位置、加速度等,进而来实现本身与环境信息,如距离、温度和压力的相互作用,环境信息通过外部传感器进行检测。下一步,通过控制器选择对应的环境模式指挥机械手完成任务。
机械手内部用到的传感器主要有以下几种:
1、光电传感器
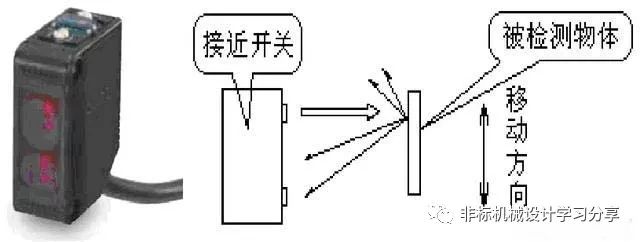
光电传感器
原理:发射器发出的检测光照射到被测物体上后发生漫发射,接收器在接收到足够强的反射光之后,光电开关开始动作。
2、电感式接近开关
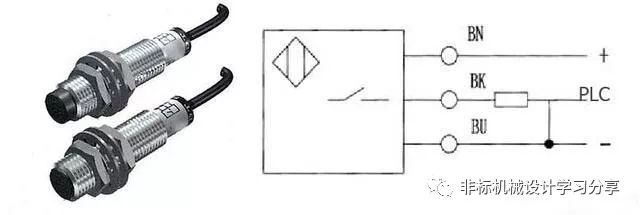
电感式接近开关
原理:电感式接近开关里面有振荡器,可以产生交变磁场,当感应距离达到某个范围,金属目标内将会产生涡流,从而使得振荡强度减弱。振荡器振荡及停振的变化,由后面的放大电路进行处理,最终转换为开关信号。
3、气缸活塞到位检测----磁性开关
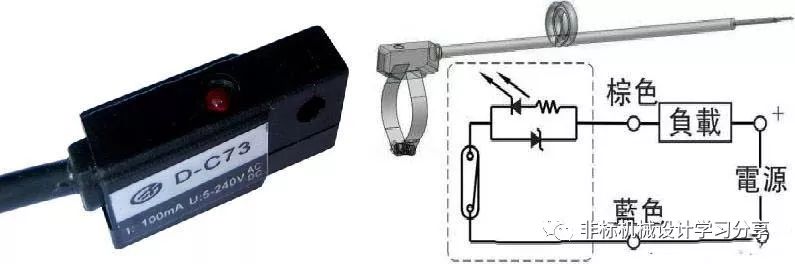
磁性开关
原理:带有磁环的气缸活塞运动到指定位置后,磁性开关内的两个金属片在磁场的作用下闭合,触发信号产生。
四、气动机械手的工作原理
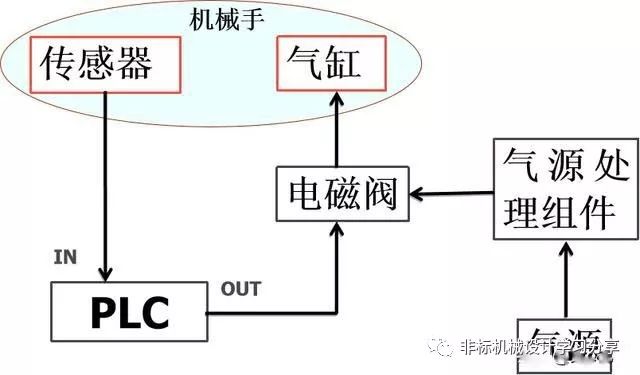
工作原理
气动机械手主要由控制系统执、驱动系统、执行机构和位置检测系统构成。在PLC程序的控制下,通过气压传动,实现执行机构动作。
控制系统的信息将指令传给执行机构,对机械手动作进行跟踪,如果动作发生错误或者故障,会立即报警。
利用位置检测装置将执行机构的实际位置传递给给控制系统,最终将执行机构以一定的精度运动到指定位置。
-
机械手 OEM 的应用2024-09-18 1053
-
机械手驱动系统设计要点2012-09-10 3614
-
注塑机机械手控制系统设计要点2012-09-11 3352
-
工业机械手系统电源的安规标准2021-02-01 4064
-
PLC控制机械手设计2008-12-13 3005
-
数控上下料机械手的研究及应用2009-04-07 568
-
基于 CAN 总线的机械手控制系统The Control S2009-06-03 650
-
基于PLC的机械手混合驱动控制2011-08-15 1294
-
基于PLC的机械手控制设计(毕业设计)2015-11-13 2679
-
机械手图册——机械手设计必看2018-02-01 2624
-
新型抓胎机械手结构优化及动作分析2018-03-07 1300
-
列车预装配柔性机械手设计2018-03-20 1119
-
分享机械手各部位主要结构元件种类处理组件等2019-07-13 23727
-
机器视觉控制机械手的具体过程2024-07-04 2375
-
案例分析,搬运机械手如何选择电机?2025-01-21 2472
全部0条评论

快来发表一下你的评论吧 !
