

《自然-通讯》发表 报告钵水母碟状幼体为灵感的无缆软体机器人
电子说
1.4w人已加入
描述
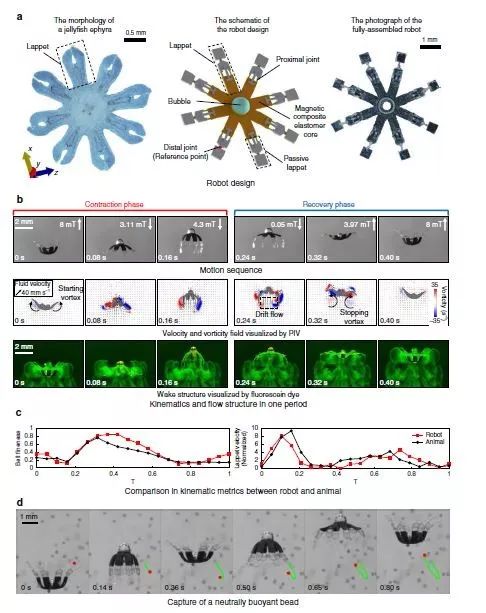
本周《自然-通讯》发表的一篇论文 Multi-functional soft-bodied jellyfish-like swimming 报告了一种以钵水母碟状幼体(scyphomedusae ephyra)为灵感的无缆软体机器人,它仅有几毫米大小,却具备运输和钻挖等多种功能。研究表明,该机器人能够操控其周围的水流动,完成一系列任务。
受水母启发的微型机器人的设计及游泳行为
游泳机器人具有生物医学和环境应用方面的潜力。虽然目前已有能够游泳的微型机器人设计,但是随着机器人尺寸的下降,诸如复杂物体操控等高级功能仍是一项不小的挑战,因为这种机器人可以搭载的组件大小是受限的。
水母机器人的活动情况和各功能展示
德国马克斯·普朗克智能系统研究所的Metin Sitti及同事设计并制造了一种仅有几毫米大小的机器人,他们将一个磁性复合弹性体核(直径3毫米)与8个可弯曲的垂瓣连接在一起,施加振荡磁场后,这些垂瓣便会收缩再恢复,就像游泳的水母一样。除了游泳,他们的水母样机器人也能选择性地运输不同大小的球珠(模拟捕食)、钻入球珠中逃避捕食者或目标对象、混合不同的流体以及在其尾迹中生成一条化学路径。作者认为他们的机器人设计也可用作模型系统,帮助理解环境中的变化如何影响水母碟状幼体的生存。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
高压放大器在介电弹性体折纸术软体机器人中的应用2024-02-27 5492
-
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究2021-04-09 3320
-
创造一个不受外界帮助的软体机器人2021-03-31 3209
-
超级高效的水母机器人 可以安全地探索濒危的珊瑚礁2021-01-26 2414
-
欧洲科学家研发出磁驱动的新型高速软体机器人2020-09-29 2960
-
超越现实生活中的同行仿水母的软体机器人2020-08-02 1660
-
科学家以昆虫为灵感,开发出半软体柔性骨骼机器人2020-05-28 955
-
软体机器人学习问题探讨2019-08-12 4763
-
拥有多功能的毫米级水母机器人问世2019-07-04 1703
-
合成血管系统问世 为软体机器人供能2019-06-20 3154
-
哈佛大学的研究人员以日本古老的剪纸艺术kirigami为设计灵感,研发出新型软体机器人2018-03-15 9166
-
看看这七款灵感来自大自然的机器人 每款都将生态与机器结合2017-07-05 1487
-
世界上第一个全软体机器人octobot2016-12-13 3593
-
模仿蚯蚓开发软体机器人2015-01-19 13286
全部0条评论

快来发表一下你的评论吧 !
