

海洋光学浮标光学窗口防污染装置
测量仪表创意
描述
前言
海洋光学浮标观测系统是发展我国立体、中远距离海洋监测高技术的重要组成部分。而光学传感器则是海洋光学浮标的一个重要组成部分。由于光学浮标一般要被放置在海水中几天到几十天进行长时间的测量,所以其辐射传感器的光学窗口长时间暴露在海水中就很容易受到水中的生物、有机物(如油类)和无机物(如泥沙)的污染。而光辐射测量对这种污染十分敏感,窗口受污染后测量误差无法估计,甚至无法进行测量。因此,必须寻求一种稳定、可靠的窗口防污染装置,有效的防止因光学传感器窗口的污染而造成的测量误差。
总体设计思想
采用保护盖与清洗刷相结合的工作原理来实现对光学仪器窗口防污、除污。清洗刷的基本原理与汽车前玻璃清洗刷相似。装置如图1所示。
保护盖由铜做成,和光学窗口之间的间隙为0.5~1mm,在保护盖的一侧装一柔软橡胶做成的清洗刷。需要采样时,保护盖携带清洁刷转动(2N+1)×180°后停止(N为保护盖转过光学窗口的次数),并从光学窗口上方移开。采样结束后将保护盖旋转180°重新遮住光学窗口,由于保护盖与光学窗口之间间隙极小,从而使光学窗口基本处于无光照状态;又由于保护盖由铜做成,而铜又有抑制生物胚胎和幼芽生长的作用,这样就可以破坏海水中大多数生物生长所需的光照条件和生存环境,在一定程度上防止了光学窗口被污染。但是,还有少数生物,可以在微光、无光、外界生存环境恶劣的条件下生长,从而污染了光学窗口,为此,在每次将保护盖从光学窗口上方移开的过程中,让保护盖携带橡皮刷紧贴光学窗口表面均匀的清扫光学窗口N次(N同前),这样即使在不采样时有少量污染物附着在光学窗口上面,也可以通过此方法清洁干净,从而双重保护光学窗口的清洁。该装置完全实现自动化。
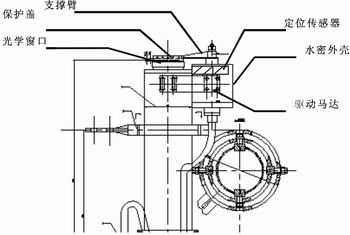
图1 光学窗口防污染装置

图2 窗口防污染装置控制硬件结构框图

图3 防污染装置系统软件流程
系统硬件组成
整个系统的硬件电路结构框图如图2所示。
系统的硬件电路主要由光学窗口防污染模块、电源管理模块、数据存储模块、通讯控制模块、时钟及CPU控制模块等组成。CPU是整个系统的控制核心,通过其内部的软件来控制整个系统的正常工作;时钟控制的主要目的是用来设置精确的窗口清洁及浮标采样时间,同时,通过配合电源控制模块控制整个系统供电电源的工作过程。数据存储器是将采集到的光学参数随时保存起来不被丢失;通信控制则用来选择与该CPU通信的对象:当我们需要采集海洋光学参数时,选择与浮标内部的采样模块通信;当整个海上实验结束后或需要将存储在外部数据存储器中的数据取出时,选择与PC机通信,这样就可以将采样所得的数据读入PC机进行数据处理与分析。
在本设计中选用了一片89C51作为系统CPU,一片PCF8563实现系统时钟控制。PCF8563基于两线制I2C总线通讯方式,可以使外围电路很简洁;同时,它还具有很低的工作电流:典型值为0.25mA(VDD=3.0V,Tamb=25℃),非常适于长期的海上工作。通过PCF8563的报警中断(分钟、小时、日期、星期四种报警中断方式)来设置精确的窗口清洁及采样时间,并通过时钟芯片报警中断输出端电平控制外部DC/DC电路的工作,进而控制系统电源的供电时间。
在此有必要说明保护盖的工作原理及过程。在如图1所示的结构中,驱动保护盖转动的装置是一驱动马达,固定在支撑臂上的保护盖跟随马达转轴成逆时针转动。两个定位传感器的核心任务是探测保护盖当前所处的位置,并根据实际需要将保护盖准确定位。用来控制该防污装置的软件是用汇编语言编写的一个子程序,当需要该防污、除污装置工作时,调用该子程序。子程序使用一组输入/输出通道和两个输入状态位与光学窗口防污装置中的定位传感器及其控制电路进行通信,从而控制马达的停止/启动以及保护盖当前所处的位置和转过的角度。
采样结束后,CPU通过查表(预先在CPU内部存入采样时间表)比较,找出下一个采样点的时间,并通过I2C总线将时间写入PCF8563的报警寄存器,同时通过软件设置关闭PCF8563的当前报警中断,终止由PCF8563报警中断输出端控制DC/DC电路的工作,停止对整个系统的供电。基于PDF8563的低功耗的特点,在仪器工作过程中,采用一VL2330电池(标准输出为3V)为其不间断的供电。
在本设计中,选用一片74244完成通信选择控制,通过CPU的P1.2、P1.3控制通信对象当P1.2为低电平,P1.3为高电平时,选择PC机作为通信对象;当P1.2为高电平,P1.3为低电平时,选择浮标内部的采样电路作为通信对象;当不需要通信时,将P1.2、P1.3均置为高电平,以防数据的误传输。
系统软件设计
本系统的软件由主函数及其调用的子函数组成。根据硬件结构,系统软件主要实现以下功能:1、光学窗口防污染控制及对光学参量的采样和存储;2、与PC机通信传输数据。主程序流程如图3所示。其中,INT1、INT0分别为两个定位传感器的状态标志位;N为保护盖转过光学窗口的次数;P1.4控制驱动马达的转动;P1.5用来选择89C51的通信对象。
结语
本文给出了整个系统的硬件电路结构框图,并在此基础上给出了主要的控制硬件电路工作的软件流程。该装置有很好的防污、除污效果。由于该装置体积小,功耗低、安装方便、全自动化操作,只要稍作改动,同样可以用于其它工作于水下易受污染仪器的防污。
-
PanDao:光学设计中的光学加工链建模2025-05-12 549
-
衍射光学元件&微结构2026-05-20 110
-
CCD光学传递函数测量装置的研究.pdf2012-07-20 3386
-
海洋光学新型NeoFox Sport手持式光学氧传感器2010-02-01 1024
-
海洋光学为LED及其它辐射源分析2010-04-17 775
-
海洋光学XR系列光谱仪覆盖~200-1050nm之间的波长2010-04-19 1637
-
海洋光学推出分辨率更高的新型近红外光谱仪2010-09-20 1068
-
海洋光学推出Torus系列衍射光栅光谱仪2011-04-30 1403
-
海洋光学HR2000光纤光谱仪飞往火星2011-12-13 3315
-
海洋光学全球副总裁孙玲博士:用创新分析仪器拥抱客户2012-04-25 6268
-
海洋光学NanoCalc实现精确薄膜分析2012-09-04 1273
-
电子罗盘在海洋浮标中的应用2020-05-07 1383
-
海洋光学的光学测量系统可替代标准光学计量仪和辐射计量仪2020-08-20 1258
-
什么是海洋浮标水质监测站?浮标水质在线监测系统有哪些功能?2023-08-16 1534
-
基于低功耗浮标的海洋数据传感采集系统2023-10-08 432
全部0条评论

快来发表一下你的评论吧 !

赚取积分