

图象处理方法在车灯配光检测系统中的应用研究
测量仪表创意
描述
in the Automobile Lamp Quality Measurement System
应用领域:汽车工业
使用的产品:LabVIEW;NI_IMAQ;NI_DAQ;
挑战:将成熟的计算机视觉技术引入车灯配光检测系统中,应用多种图象处理方法同时实现汽车车灯光轴交点检测和车灯零件检测。
应用方案:使用National Instruments公司的IMAQ可视化软件、LabVIEW图片控制工具包、执行程序生成器和LabVIEW来开发一个经济、灵活的基于PC的车灯配光检测系统。
介绍:
车灯配光检测系统原为两套系统:车灯光轴交点检测系统和车灯零件检测系统,其通过人工目测检测车灯光轴交点,应用物位传感器精确定位来检测零件的缺损。本车灯配光检测系统将两系统二合为一,根据测量对象的特征,应用图象卷积、边缘特征提取、图象模式匹配等多种图象处理的方法,实现对不同型号的车灯进行车灯零件缺损检测和车灯光轴交点的自动检测。
系统组成:
整个系统包括硬件部分和软件部分。其系统组成简图如图1所示:

图1:系统组成简图
硬件部分主要运用黑白的CCD摄取图象,图象通过美国NI公司的1407图象采集卡传送入PC机进行处理及数据显示,应用NI_DAQ6023卡控制摄像头间的切换及系统的启动和停止。本系统采用NI公司的LabVIEW5.1及其图象处理软件包IMAQ Vision5.0作为软件操作平台。其系统的主界面如下图(图2)所示:

图2:系统主界面
系统运行中的一个检测报错界面如下图(图3)所示:

图3:检测报错界面
运用NI(美国国家仪器公司)的这套虚拟开发平台软件,是因为其使用图形化编程语言编写,并提供丰富的库函数和功能模块,具有功能强大及运用灵活等特点,极大的节约了程序开发时间。
光轴交点检测中的图象预处理方法
(1)光轴特征分析
本车灯配光检测系统实现计算机自动检测车灯前照灯光路所成的交点。若为一右侧行驶前照灯,则其光路图如图4所示:

图4:前照灯光路图
h-h:通过前照灯焦点的水平面;
H-H2:道路中心线;
v-v:通过前照灯的垂直面;
根据前照灯光路标准H—H2与h—h的夹角为15°,且ZONE1为暗区,而ZONE2为亮区,两个区域分界明显,有较大的亮度对比度。H-H2与h-h的交点位置是车灯光轴检测的一个重要参数。
(2)图象的原始LUT变换
LUT(Look_up Table)变换是一种很基本的图象处理技术,其对图象象素的灰度值进行特定计算及转换,可以达到突出图象的有用信息,增加图象的光对比度,对要进行边缘检测的图象尤佳,可以使边缘明显。本系统的车灯光轴原始图如图5所示:

图5:光轴原始图
由于车灯光线较强,使得整个图象偏亮,图象边缘特征不明显。本系统采用具体的反指数函数查表变换方法,降低暗区的亮度和对比度同时增强亮区的亮度和对比度,使检测图象边缘明显。经过LUT处理后的光轴图象如图6所示:
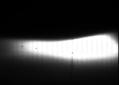
图6:经过LUT后的光轴图
(3)图象的裁剪
由于精度的要求,射入的图象为768X576 pixel的标准CCIR图象。象素多可提高系统的测量分辨率,同时也增加了处理数据,增加了处理时间,从而就有可能影响整个系统的实时性。所以要根据图象特点,减少处理数据,对图象进行有效的裁减,裁去不需要的部分,留下有用的部分,减少处理量。通过对本近光灯光轴的自身特点的分析,我们可以发现其图象的光轴交点就在图象最亮区域附近。对于最亮的区域检测其运算量视定义的亮区大小而定,具有随机性,而且处理数据量也不小。这里我们运用检测图象质量中心的方法来确定图象处理区域。图象质量中心其不是光亮中心,其计算公式为:
质量中心Y坐标公式类似。虽不是光亮中心,但其接近光亮中心,处理量固定,运用于此系统,能根据其位置确定交点存在可能区域,减少了数据处理量。
(4)图象的边缘增强及图象的二值化
边缘检测通常的方法就是对图象进行灰度边缘增强处理,得出一个增强处理后的图象,然后设立门限,进行过门限处理来确定明显边缘的象元位置。经过LUT处理后的图象,边缘特征已比原始图象清晰得多,我们对此图象再进行一次二值化以便于后面边缘的检测,同时也便于对图象中部分干扰因素的处理。对图形进行二值化主要要考虑的问题就是阀值的选取。阀值应随着空间总体幅度的变化而变化,阀值设得过高,将漏掉小幅度变化的边缘,阀值设得低,将出现由噪声引起的许多的虚假的图象边缘。寻找一种对各种噪声不敏感、定位精确、不漏检真边沿又不引入假边沿的阀值取定方法是此图象二值化的关键,这也是图象处理领域长期研究的一个方面。为寻找一个合理的阀值,要通过大量的实验方可。在此,为了处理方便,也为了减少工作量,在一定的误差范围内,通过对图象边缘再进行一次边缘特征提取——空间矢量梯度滤波,再次增强边缘,然后通过实验人工确定一阀值量,对图象进行二值化。空间矢量梯度滤波是运用一软件滤波器,使图象象素光强度按特定的方向变化,增强图象中基本颗粒的外部轮廓,即边缘特征,显示其形体结构。空间矢量梯度滤波实际上就是用一定的计算因子在整幅图中做象素灰度卷积。因为本系统重要边缘信息主要集中在基本颗粒的上边缘,所以就选取了加强上边缘的计算因子,处理以后的图象如图7所示:

图7:经过边缘加强后的光轴图
经过此处理后,图象基本颗粒边缘象素灰度的对比度已得到增强,我们就可以通过实验确定数值大的阀值对图象进行二值化,其误差在允许的范围内。
(5)图象的去干扰处理
在经过二值化的图象中,我们可以发现很多小颗粒,这些颗粒都有可能阻碍图象的正确处理,即边缘的正确检测,所以必须去除。这里,我们用图形学最经典的膨胀和腐蚀方法对二值化进行处理。膨胀和腐蚀的原理虽然简单,但对于膨胀和腐蚀所用计算因子象素包含量的确定及膨胀腐蚀次数确定却需要作一定的考虑与实验比较。膨胀和腐蚀必须成对出现,因为腐蚀能去掉小颗粒,同时却也使检测边缘缩进,使检测产生误差,所以在腐蚀的同时必须伴有同样计算因子的膨胀。膨胀和腐蚀的次数按图象中出现的干扰颗粒的大小,通过实验的方法确定。
模式匹配在零件检测中的应用
原先系统应用物位传感器的精确定位来检测车灯零件的缺损,不同型号的车灯要制造不同零件分布的检测设备,而此配光检测系统应用图象处理的方法,通过制作图象模板来检测车灯零件的缺损,提高系统的灵活性,实现柔性测量。通过分析车灯零件摄入图及零件在与不在时的各种情况,从零件的轮廓特征和灰度特征入手,综合多种图象的模式识别技术,包括使用LabVIEW vision中强大的模式识别函数,通过大量实验,合理设置参数,减少外界光线对检测结果的干扰,提高检测的可靠性和稳定性。
结论:
应用LabVIEW及其IMAQ vision图象处理软件包,在较短的时间内开发了此套车灯配光检测系统,其可通过软件设置对不同型号的车灯进行零件检测,同时实现了光轴交点的自动检测,是一套柔性的检测系统,其可完成的技术指标主要有:
尺寸分辨率:1mm
最大检测尺寸:500mm
检测节拍:£30秒
模拟量检测精度:0.5%FS
连续工作时间:³16小时
更值得一提的是,若对软件稍加改动,此系统亦可用于其他产品的零件检测,有较大的市场前景。
-
车身覆盖件曲面延展设计方法的实现及应用研究2009-04-16 2933
-
跌倒检测在远程健康监管系统中的应用研究2011-07-15 3332
-
资源分享季 (9)——FPGA在图象处理中的应用的论文.zip2012-07-28 6789
-
MATLAB在数字图象处理中的应用2012-08-03 5307
-
基于DSP的图像处理系统的应用研究2012-12-19 9805
-
图象处理中的哈夫变换和Canny边缘检测算法2020-03-16 1299
-
拓扑优化方法在拱坝设计中的应用研究2010-05-04 902
-
图象处理技术在车牌识别中的应用2009-12-08 1407
-
计算机视觉技术在车灯零件检测中的应用2011-09-08 829
-
扩展Prony算法在电力系统非整次谐波检测中的应用研究2016-12-28 1072
-
ZigBee和GPRS技术在水文监测系统中的应用研究2017-01-08 1007
-
Petri网在计费系统中的应用研究_侯煜2017-03-19 1157
-
基于DSP的图象处理模块的设计与研究2017-10-23 1085
-
如何实现微弱信号检测的随机共振详细方法与应用研究2019-12-24 3033
-
基于非接触式图象处理方法实现红外CCD矿井轨道运输监测系统的设计2020-04-28 1322
全部0条评论

快来发表一下你的评论吧 !

赚取积分