
3D激光SLAM核心:为什么要进行点云特征提取
让你从古到今的了解什么是“车规级”

镭神智能首次攻破国产激光雷达矿区无人驾驶应用难题——让灰尘“隐形”,不再遮“眼”
镭神智能|轨道异物侵限智能监测方案

智能汽车三种常见的传感器是什么
爬壁机器人的分类有哪些 爬壁机器人和其他机器区别在哪

什么是SLAM?视觉SLAM怎么实现?
自动驾驶汽车定位技术有哪些

单车智能争夺战:激光雷达VS视觉摄像头

LOG-LIO: 一种高效局部几何信息估计的激光雷达惯性里程计方法

什么是SLAM SLAM技术目前主要应用在哪些领域?
基于正态分布变换(NDT)的实时三维SLAM方法
机器人是如何控制运动的 爬壁机器人结构设计原理是什么
自动驾驶三大技术要素是什么 自动驾驶如何识别车道
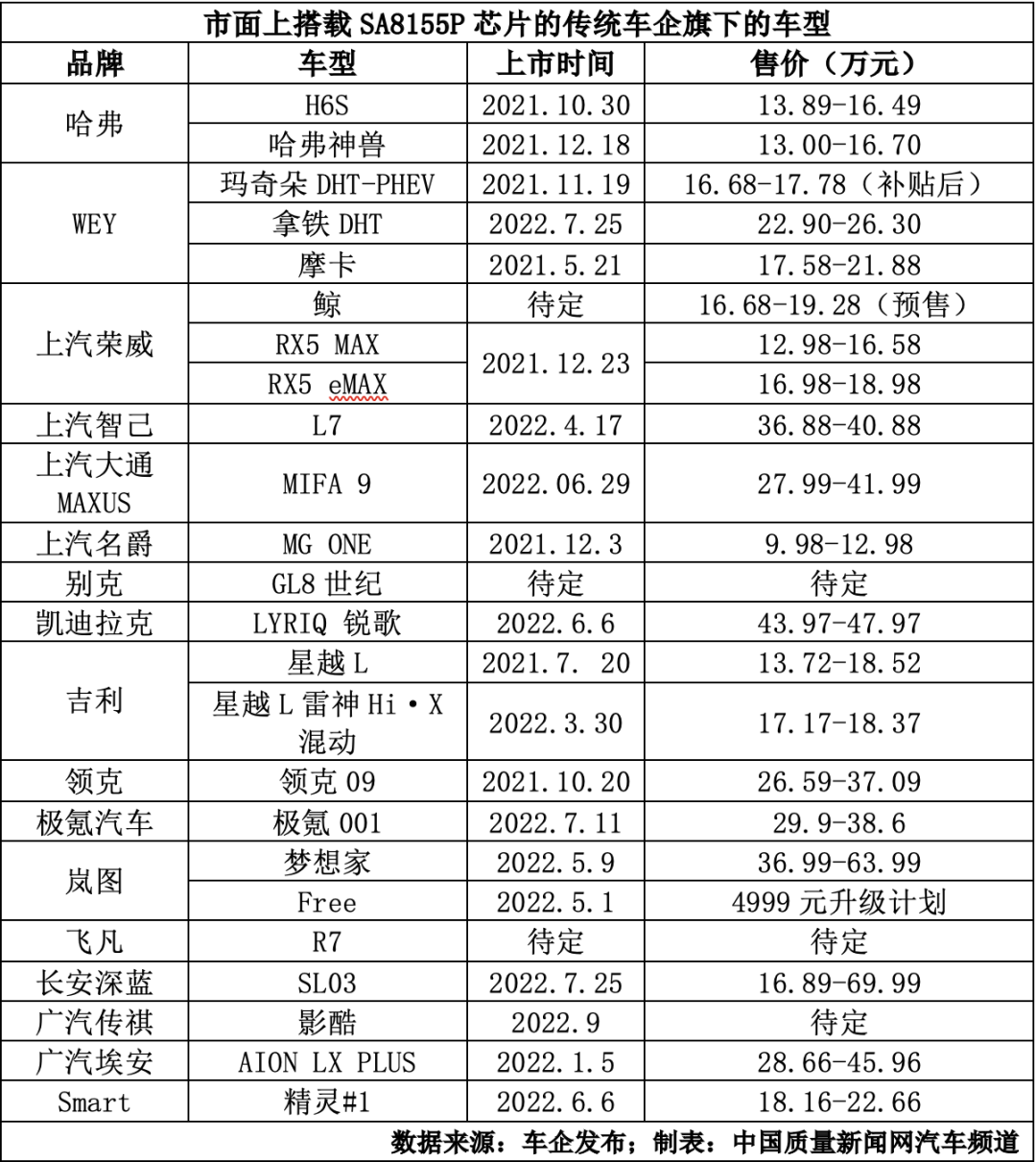
为什么车企都选择8155芯片呢?为什么比亚迪又是一个例外呢?

什么是车规级?有车规级的激光雷达吗?

汽车激光雷达技术面临的机遇和挑战是什么

自动驾驶中激光雷达和视觉感知的区别
激光雷达的优缺点有哪些
请问光学以太网是汽车的未来吗?

 下载APP
下载APP
 搜索内容
搜索内容
