VASS KUKA电伺服焊钳的SG_Background控制
KUKA机器人系统函数INVERSE()介绍
CP340的ASCII通讯(STEP7)
在电力行业中如何在HSR/PRP/PTP网络中经济高效地进行持续监控?
工业机器人编程运动教程
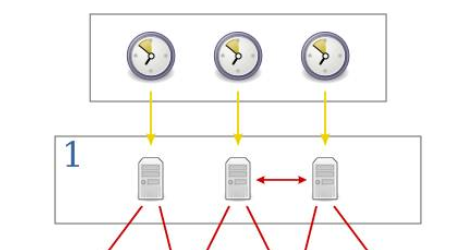
网络时间协议和精简网络时间协议同步解决方案

 下载APP
下载APP
 搜索内容
搜索内容