首页
技术
可编程逻辑
MEMS/传感技术
嵌入式技术
模拟技术
控制/MCU
处理器/DSP
存储技术
EMC/EMI设计
电源/新能源
测量仪表
制造/封装
RF/无线
接口/总线/驱动
EDA/IC设计
光电显示
连接器
PCB设计
LEDs
汽车电子
医疗电子
人工智能
可穿戴设备
军用/航空电子
工业控制
触控感测
智能电网
音视频及家电
通信网络
机器人
vr|ar|虚拟现实
安全设备/系统
移动通信
便携设备
物联网
区块链
HarmonyOS
RISC-V MCU
光伏
ChatGPT
IGBT
充电桩
氮化镓
BLDC
逆变器
5G
电机控制
资源
技术文库
新品速递
电路图
元器件知识
电子百科
下载
在线工具
常用软件
电子书
datasheet
专栏
电子说
专栏
社区
论坛
问答
小组
社区之星
试用中心
HarmonyOS技术社区
2023电子工程师大会
研究院
活动
设计大赛
硬创大赛
社区活动
线下会议
在线研讨会
小测验
学院
直播
课程
视频
企业号
华秋智造
华秋PCB
高可靠多层板制造商
华秋SMT
高可靠一站式PCBA智造商
华秋商城
自营现货电子元器件商城
PCB Layout
高多层、高密度产品设计
钢网制造
专注高品质钢网制造
BOM配单
专业的一站式采购解决方案
华秋DFM
一键分析设计隐患
华秋认证
认证检测无可置疑
工具
PCB在线检查
datasheet查询
选型替代查询
免费样品申请
免费评测试用
工程师专区
技术子站
搜索
推荐
全部
直播
课程
+ 发视频
意见反馈
返回顶部
返回顶部
播放出错了,
刷新
试试
硬件位置比较输出和编码器锁存:EtherCAT超高速运动控制卡XPCIE1032H上位机C#开发 #正运动
编码器
上位机
243
13
0
0
正运动技术
获赞
653
粉丝
64
关注
评论
0
发布评论请先登录
登录
发布
暂无评论
合集 · EtherCAT超高速实时运动控制卡
(13集)
第1集
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#人工智能 #运动控制卡# 正运动技术
03:44
第2集
EtherCAT超高速实时运动控制卡XPCIE1032H驱动安装# 运动控制卡# 正运动技术# PCIE
03:05
第3集
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化
04:51
第4集
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(三):EtherCAT总线模式切换
04:20
第5集
超高速实时运动控制卡XPCIE1032H上位机C#开发(四):板载IO与总线扩展IO的编码器与脉冲配置的应用
07:43
第6集
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(五):通过RTSys进行调试与诊断
04:49
第7集
硬件位置比较输出和编码器锁存:EtherCAT超高速运动控制卡XPCIE1032H上位机C#开发 #正运动
04:43
第8集
正运动技术单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机开发
09:30
第9集
二维/三维的多轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机开发
07:49
第10集
EtherCAT驱动器回零与控制器回零:EtherCAT超高速实时运动控制卡XPCIE1032H上位机开发
06:29
第11集
项目工程下载与XML配置文件下载:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发
01:49
第12集
PT/PVT运动模式介绍:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#人工智能
04:37
第13集
自定义电子凸轮曲线的运动:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发 #人工智能
04:10
视频推荐
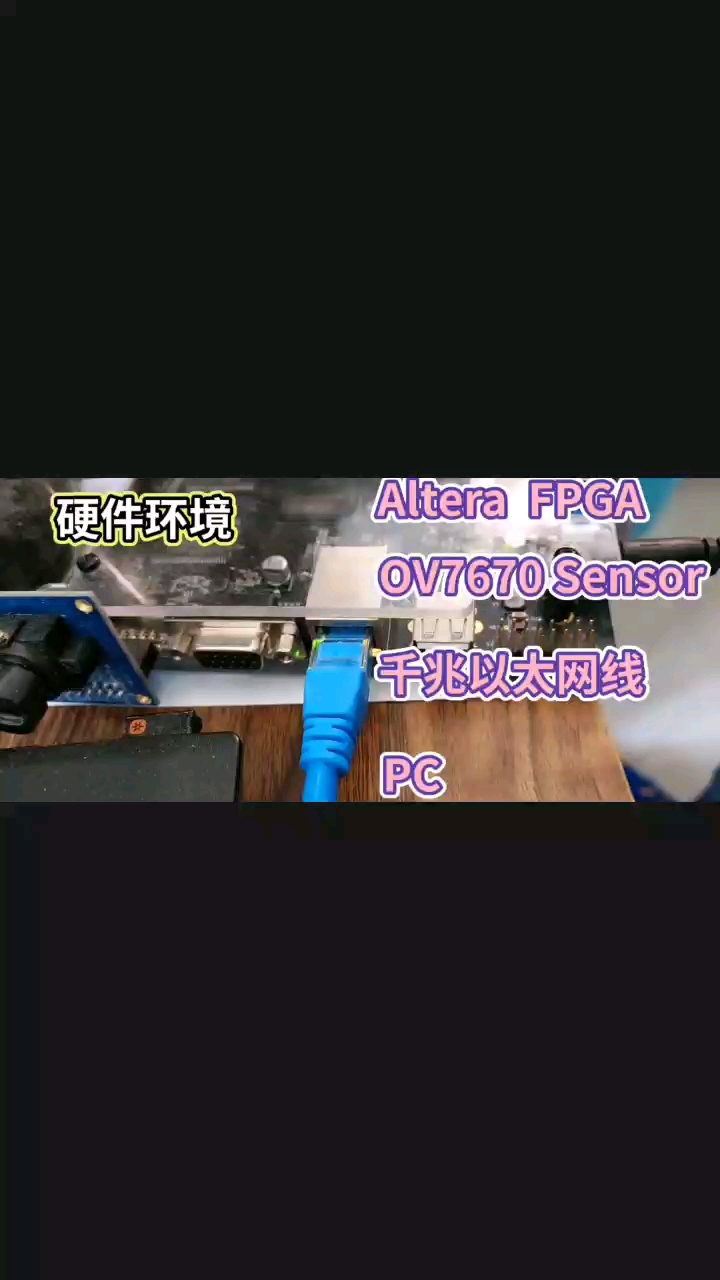
FPGA实现千兆网UDP协议图传,上位机显示
kang
2924
46
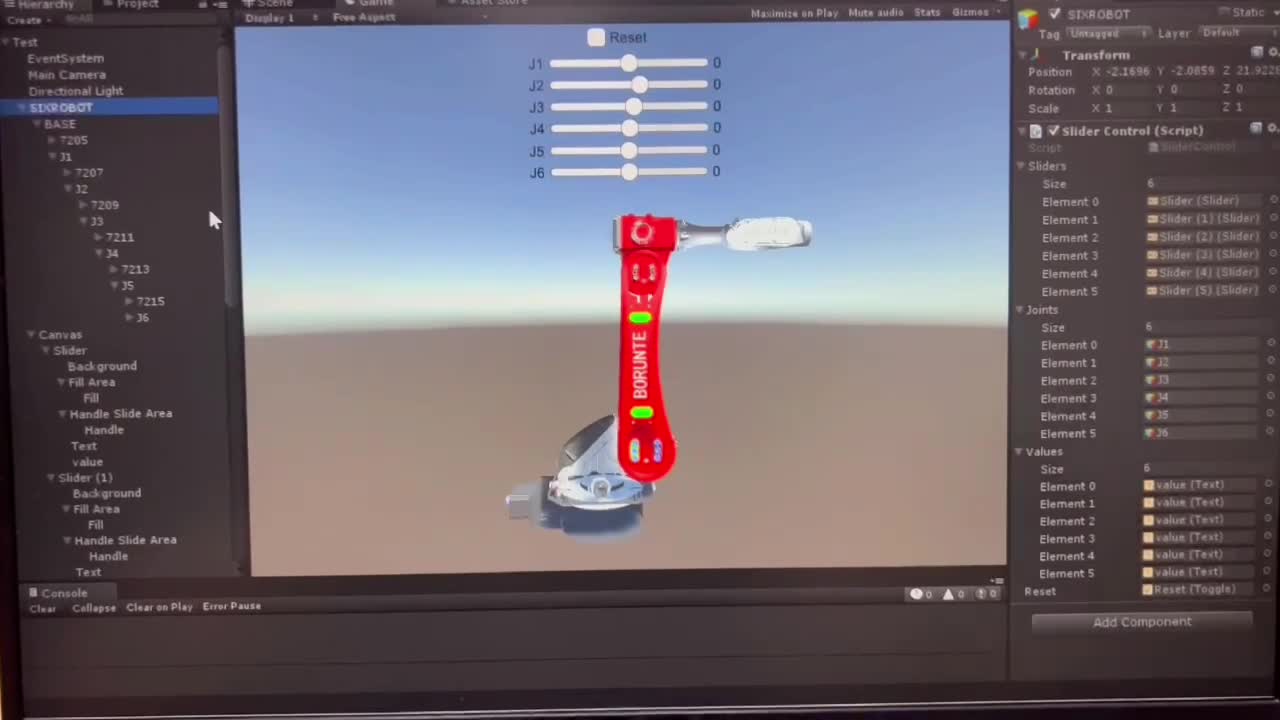
学unity之可视化上位机交互 或者说数字孪生?
ZSH实验室
2175
66
自制喷水闹钟,每天准时滋醒你。 #GD32f103 #CubeMX #stm32 #上位机制作
平韵の硬声小分部
1724
43
labview实战——氮氧传感器上位机#跟着UP主一起创作吧 #硬声新人计划 #造物大赏
秋刀烤鱼
1099
89
开源源码 使用FPGA构建机器人 并结合了ESP8266和python上位机 记录和分享经验
田小花
1091
98
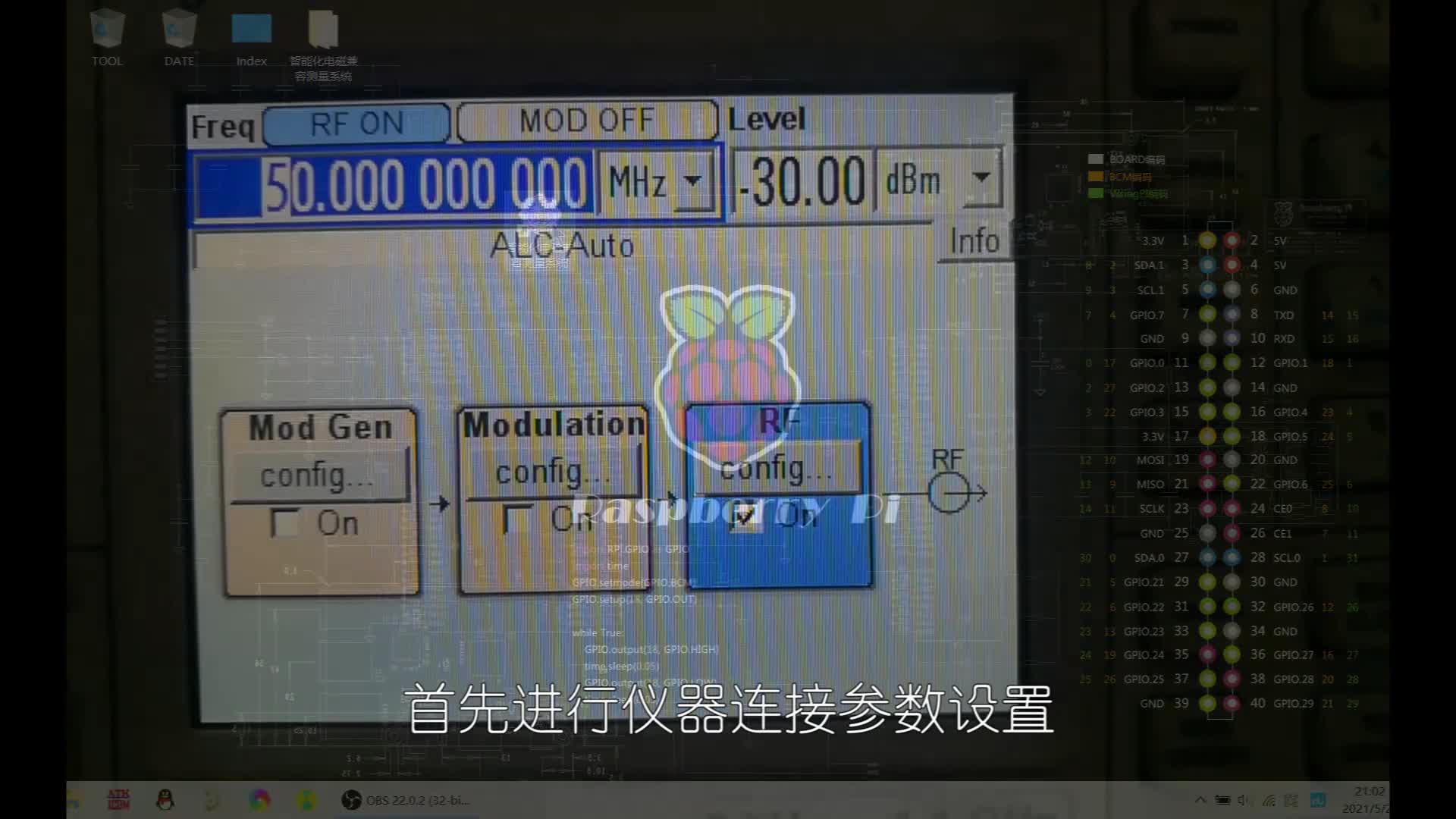
智能电磁信号分析系统上位机
爱转的光凌
975
173
基于89c52实现串口通信 采集电压并且通过AD转换在上位机和数码管上现实
jf_28920065
669
53
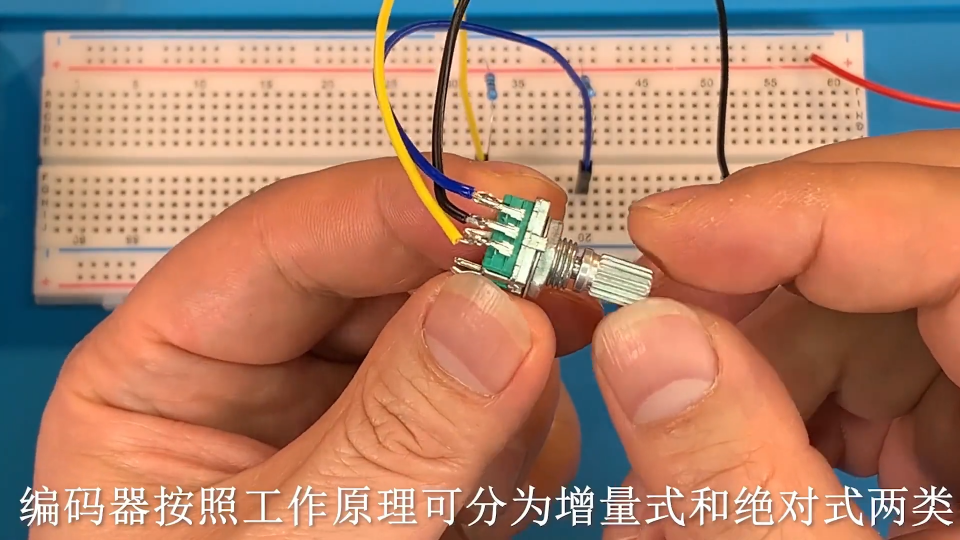
编码器 (示波器演示+拆解)
学习电子知识
490
11
【ADO】 六轴机器人(6轴机械手臂) + DIY+滑台+上位机软件
最美不過是回憶
463
15
【ADO】六轴机器人上位机,提供和下位机的通信协议~可运动仿真
最美不過是回憶
414
12
关注获得更多福利和技术分享
线下会议、在线研讨会和活动应有尽有