

rt-thread移植三星芯片
好的,为三星(Samsung)芯片移植 RT-Thread 是一个相对复杂但系统化的过程。其核心在于为目标芯片创建或适配一个 BSP(Board Support Package)。以下是关键步骤和注意事项(假设目标芯片基于 ARM 架构,这是三星嵌入式芯片的主流):
核心步骤:
-
明确目标硬件:
- 具体芯片型号: 这是最重要的起点!三星芯片范围很广(如 S3C24xx/S3C64xx 等 ARM9, S5PV210/Exynos 等 Cortex-A, 或者 Cortex-R/M 系列)。不同芯片的寄存器、外设地址、启动流程差异巨大。必须先明确芯片型号。
- 开发板: 确定你是为官方开发板(如有)还是自定义板卡移植。这决定了串口、内存布局等硬件连接的细节。
-
准备 RT-Thread 源码:
- 从 RT-Thread GitHub 或 RT-Thread 官网 获取最新的稳定版本源码。
- 在
rt-thread/bsp目录下,查看是否已有相似芯片或板卡的 BSP。这是最高效的起点。 即使不是完全匹配,基于相似架构(如都是 Cortex-A7)的 BSP 进行修改会省时很多。
-
创建/配置 BSP 目录:
- 如果没有现成 BSP,在
rt-thread/bsp下创建一个新目录,例如your_samsung_chip。 - 复制一个架构相似的现有 BSP 的内容(如某个 Cortex-M 或 Cortex-A 的 BSP)到这个新目录作为模板。RT-Thread 提供了一些
template目录作为参考。 - 关键文件/目录:
rtconfig.py: 最重要的构建配置脚本。 用于开启/关闭组件、配置编译器、链接器、优化等级、指定包含路径、定义芯片相关宏(如BSP_USING_UART1,BSP_USING_GPIO)。board/: 包含板级硬件初始化代码。board.c: 系统时钟初始化 (SystemClock_Config()或类似)、外设引脚初始化、内存堆初始化 (rt_system_heap_init())。linker_scripts/: 存放链接脚本 (.ld文件)。 这非常关键! 它定义了代码、数据、堆栈、堆在内存中的布局,必须精确匹配你目标芯片的内存地址空间(Flash起始/大小、RAM起始/大小)。通常需要修改基地址和大小。drv_xxx.c: 板级外设驱动实现的基础,通常调用设备驱动框架或HAL。
libraries/: 可以放置芯片厂商提供的标准外设库(如 SPL/HAL)或你自己编写的底层驱动封装。applications/: 可放置简单的测试应用(main.c)。Kconfig: (可选但推荐)用于图形化配置(menuconfig)RT-Thread 组件。
- 如果没有现成 BSP,在
-
移植/实现底层驱动:
- 串口 (UART): 串口驱动是移植的“生命线”,用于后续打印调试信息 (
rt_kprintf)。需要实现:- 初始化函数(配置波特率、数据位、停止位等)。
- 发送一个字符的函数 (
rt_hw_console_output)。通常只需实现这个。 - 接收字符的函数 (如果需要输入,实现
rt_hw_console_getchar)。 - 中断服务程序 (ISR) 处理(发送完成、接收数据中断)。在
board.c或单独的drv_uart.c中实现。
- 系统时钟 (SysTick 或 Timer):
- RT-Thread 需要一个稳定的时基(心跳)供内核调度使用。通常是基于 ARM 的 SysTick 定时器(如果芯片有)。
- 实现
SysTick_Handler中断服务程序,调用rt_tick_increase()。 - 在
board.c中初始化系统时钟和 SysTick (SystemClock_Config->HAL_SYSTICK_Config或等效操作)。
- 中断控制器 (如 GIC, NVIC):
- 实现中断挂接 (
rt_hw_interrupt_install) 和中断全局开关 (rt_hw_interrupt_disable/rt_hw_interrupt_enable) 函数。这些函数通常基于芯片的中断控制器寄存器操作。 - 在 ISR 中,需要调用系统中断处理框架 (
rt_interrupt_enter/rt_interrupt_leave)。
- 实现中断挂接 (
- 系统时钟与 HWTIMER: (可选,依赖 HAL 或自定义)
- 如果使用高精度硬件定时器,需要实现
timer框架下的操作函数 (rt_timer_hw_init,rt_timer_hw_start等)。
- 如果使用高精度硬件定时器,需要实现
- 内存管理:
rt_system_heap_init()通常在board.c中调用,传入堆空间的起始地址(通常在 RAM 中)和结束地址。确保这个空间不与.data/.bss或栈区域重叠。
- GPIO, SPI, I2C, PWM, RTC 等: (可选)
- 根据需要,实现这些驱动,可以通过适配芯片厂商的标准库(如 HAL),或者直接操作寄存器实现(效率高,但开发复杂)。RT-Thread 提供了
pin,spi,i2c,pwm等驱动框架接口。
- 根据需要,实现这些驱动,可以通过适配芯片厂商的标准库(如 HAL),或者直接操作寄存器实现(效率高,但开发复杂)。RT-Thread 提供了
- 串口 (UART): 串口驱动是移植的“生命线”,用于后续打印调试信息 (
-
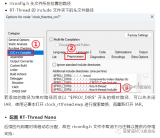
配置构建系统 (env/SCons):
rtconfig.py配置: 修改CROSS_TOOL为你的交叉编译器前缀(如arm-none-eabi-),配置ARCH=arm和CPU(如cortex-m4/cortex-a7)。设置正确的编译/链接选项(CFLAGS,LINKFLAGS)。在LIBS中添加标准库(如libc.alibgcc.a)。启用所需组件 (RTT_USING_XXX)。- 编译器工具链: 确保已安装并正确配置对应 ARM 架构的交叉编译工具链(如 arm-none-eabi-gcc, aarch64-none-elf-gcc)。
- 使用 env 工具: RT-Thread 推荐使用其
env工具和scons命令进行构建。在 BSP 目录下运行scons开始编译。menuconfig(需要配置了 Kconfig)可用于图形化配置组件。
-
编译、下载与调试:
- 编译: 在 BSP 目录运行
scons。如果成功,将生成.elf/.bin/.hex等文件。 - 下载: 使用 JTAG/SWD 调试器(如 J-Link, OpenOCD 配合)或特定的烧录工具(三星芯片可能有专用工具链)将固件烧录到目标板。
- 调试:
- 串口调试: 最常用和重要! 连接目标板的串口到 PC,使用终端工具(如 PuTTY, Tera Term, Minicom)查看
rt_kprintf的输出。这是判断启动是否成功、定位问题的主要手段。请务必确保串口初始化成功并能输出字符。 - 调试器: 使用 GDB(配合调试器硬件)进行单步、断点调试,定位复杂问题。
- 启动过程: 重点关注
.bss段清零、.data段复制(从 Flash 到 RAM)、堆栈初始化、第一个任务启动是否成功。
- 串口调试: 最常用和重要! 连接目标板的串口到 PC,使用终端工具(如 PuTTY, Tera Term, Minicom)查看
- 编译: 在 BSP 目录运行
关键注意事项:
- 数据手册与参考手册: 必备! 你需要目标芯片详细的用户手册或技术参考手册(TRM),以了解内存映射、寄存器定义、时钟树、外设操作、中断号等核心硬件信息。三星官网是首要来源。
- RAM/ROM 地址: 链接脚本 (
link.lds/sct) 必须精确匹配目标板上的实际 Flash 启动地址(通常是0x00000000或类似)和 RAM 地址范围。错误的链接脚本是导致无法启动的常见原因。 - 启动文件: 基于 ARM Cortex-M 的芯片通常需要包含汇编启动文件(
startup_xxx.s),其中定义了中断向量表(IVT)、堆栈指针初始值,以及Reset_Handler函数(进行必要的 CPU 初始化,调用__main->__rt_entry->main_thread_entry/$Sub$$main->rtthread_startup)。基于 Cortex-A 的芯片启动流程更复杂,可能涉及 BootROM/SPL/U-Boot。 - 官方库: 如果三星提供了芯片的标准外设库 (SPL) 或硬件抽象层 (HAL) 库,强烈建议使用它们作为底层驱动的基础。这可以大大简化寄存器操作,提高开发效率和代码可维护性。将其源代码或库文件放在 BSP 的
libraries/目录下。 - 内存对齐与访问: 注意 ARM 的内存对齐要求(尤其是对
u32/指针),特别是中断向量表的位置(需要自然对齐)。 - 优化与调试: 初期编译建议关闭优化 (
-O0) 并开启调试信息 (-g),便于调试。稳定后再调整优化等级。 - RT-Thread 文档: 充分利用 RT-Thread 官方文档中心,特别是 BSP 制作、驱动开发、内核配置等章节。
- 社区支持: 遇到问题时,先在 RT-Thread 文档、GitHub Issues 或论坛中搜索。也可以在社区提问(描述清楚芯片型号、问题现象、已尝试操作)。
总结:
移植的核心是 BSP 的制作。流程围绕配置构建系统、修改链接脚本、实现关键底层驱动(尤其是串口和系统时钟)、适配启动流程展开。起点是 明确芯片型号 并在 rtconfig.py 中做好基础配置和 链接脚本 适配。仔细阅读手册 和 善用串口调试 是两个成败的关键因素。
建议从一个官方已有的、尽可能相似架构的 BSP 开始修改(如找 Cortex-M4 的 BSP 改),这能省去很多麻烦。祝你移植顺利!
如何将RT-Thread移植到NXP MCUXPressoIDE上

RT-Thread默认支持的IDE只有IAR 和 Keil, 那如何将RT-Thread移植到NXP MCUXPressoIDE上呢?本文内容比
2025-02-13 10:37:08
i.MX RT1170:VGLite移植RT-Thread Nano过程讲解(下)
上篇介绍了如何移植 RT-Thread Nano 内核与 Finsh 控制台到 RT1170。本篇继续介绍如何将 NXP 官方的 VGLite
2023-11-09 11:22:03
i.MX RT1170:VGLite移植RT-Thread Nano过程讲解(上)
RT-Thread 是国人自主研发的开源实时操作系统(RTOS),RT-Thread Nano 是极简版的硬实时内核,内存占用小,移植简单。VG
2023-11-09 11:20:11
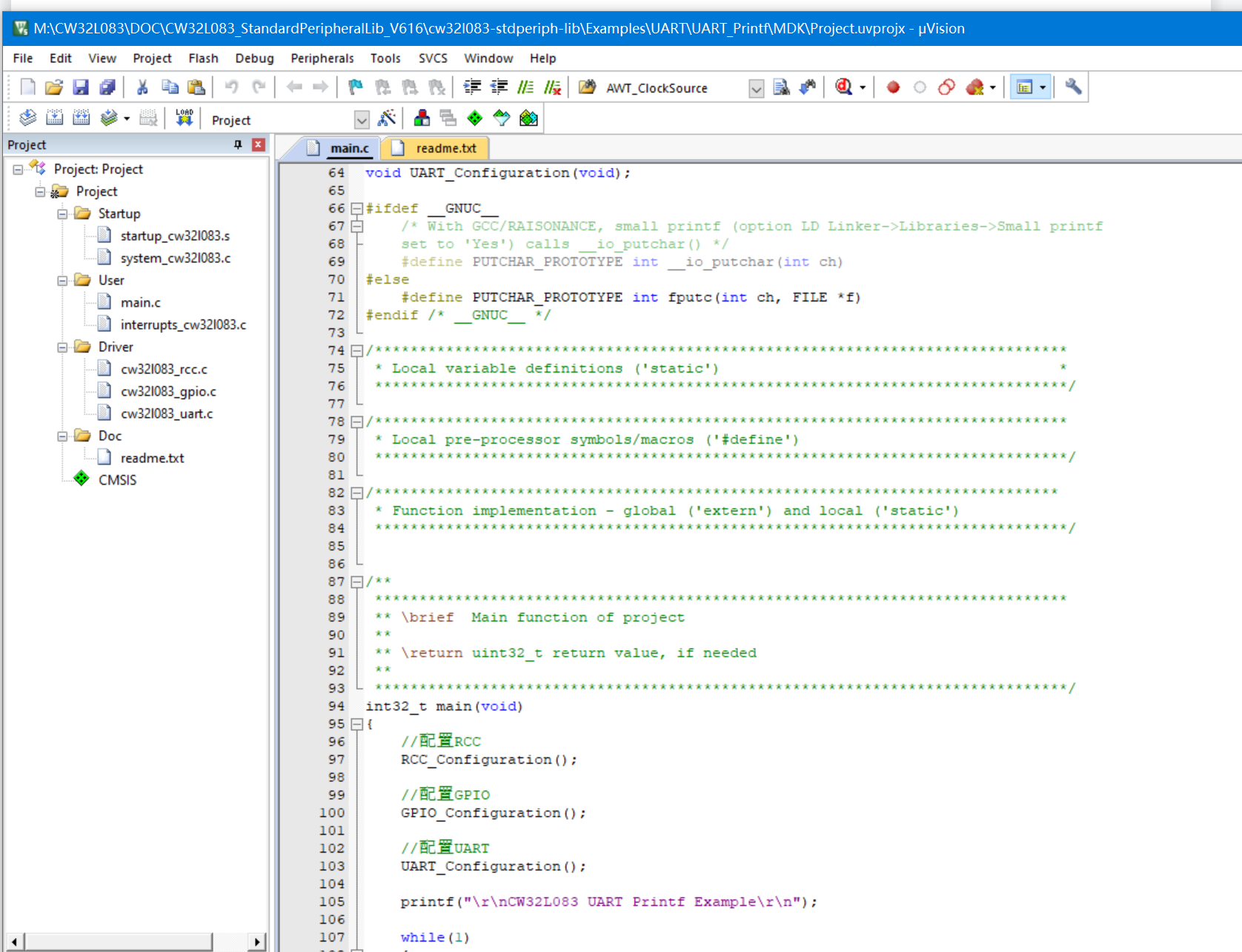
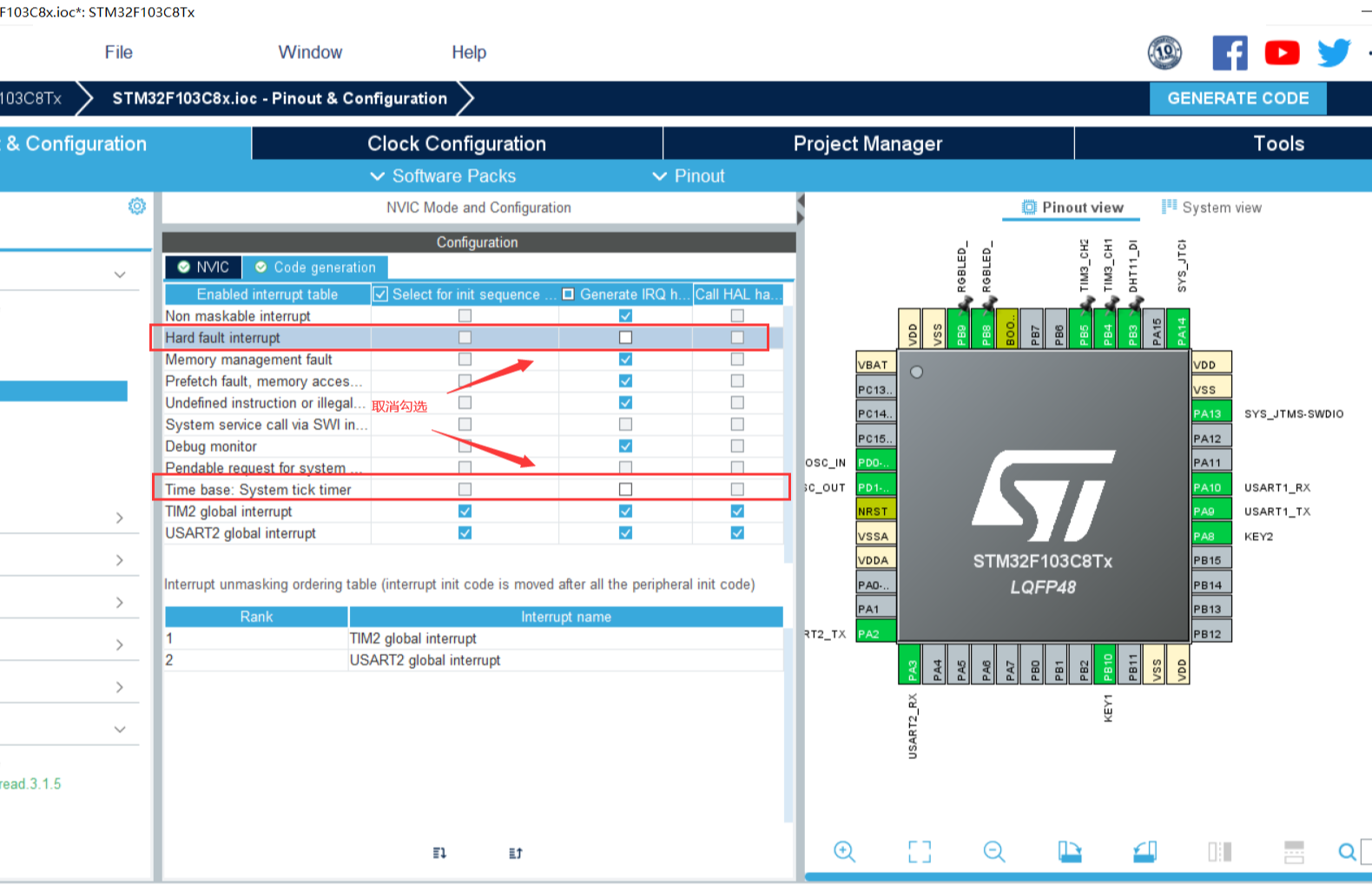
基于 Keil MDK 移植 RT-Thread Nano
本文介绍如何基于 Keil MDK 移植 RT-Thread Nano ,并以一个 stm32f103 的基础工程作为示例进行讲解。 RT-Thread
资料下载
![]() 王飞云
2022-01-26 17:04:49
王飞云
2022-01-26 17:04:49
【国产MCU移植】移植RT-Thread到国产芯片HC32F460PETB
【国产MCU移植】移植RT-Thread到国产芯片HC32F460PET
资料下载
![]() 南风一号
2021-11-23 18:06:39
南风一号
2021-11-23 18:06:39
RT-Thread qemu mps2-an385 bsp移植制作 :环境搭建篇
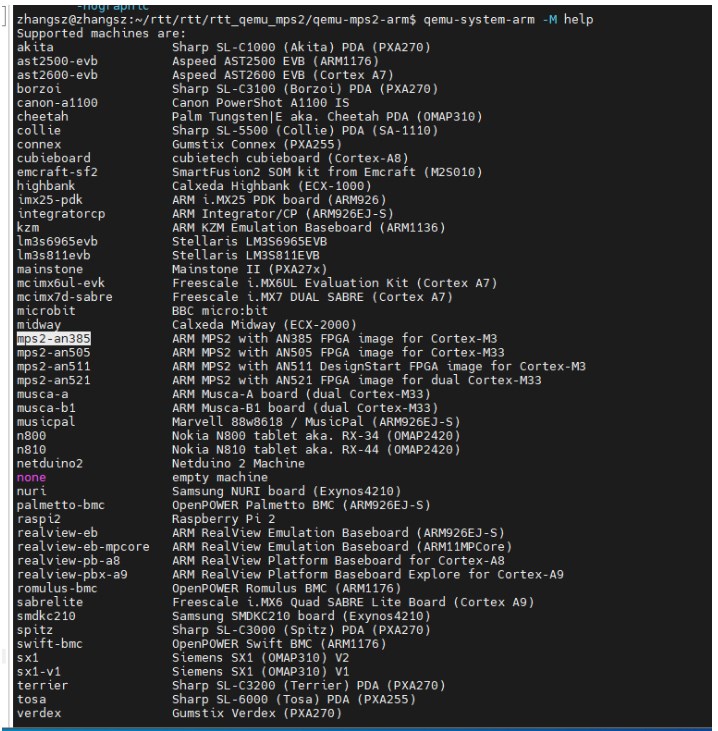
最近打算系统地研究一下 RT-Thread,包括 RT-Thread BSP 的移植,由于一直在使用 QEMU 进行一些软件功能的验证,qemu
2023-08-02 14:45:36

RT-Thread NUC97x 移植 LVGL
不涉及 rt-thread 驱动,但是它是 LVGL 和 rt-thread 的接口。LVGL 在 rt-thread 上运行的基石。
2022-07-08 09:37:09
机智云设备移植RT-Thread
程中,通常会有多个功能,这个时候就需要用到实时系统,比如FreeRTOS,AzureRTOSThreadX,RT-Thread等,笔者这里推荐RT-thread。
2022-04-19 18:39:55
如何创建RT-Thread Nano工程
本文将尝试使用国产的嵌入式实时操作系统RT-Thread,相比较于FreeRTOS,RT-Thread还是有很多有点的,比如有Fish命令行界面,国产开源免费,Nano版本代码量极小,
2022-03-19 12:13:52
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- dtmb信号覆盖城市查询
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105