

单片机超声波雷达焊接教程
更多
以下是单片机超声波雷达系统的焊接与搭建教程,分步骤详细说明硬件连接、焊接要点及代码调试流程:
一、所需材料清单
| 模块 | 型号/参数 | 数量 |
|---|---|---|
| 主控板 | STM32F103C8T6/Arduino UNO | 1 |
| 超声波模块 | HC-SR04 | 1 |
| 舵机 | SG90(180°旋转) | 1 |
| 杜邦线 | 公对公/母对母 | 若干 |
| 旋转支架 | 3D打印或自制L型支架 | 1 |
| 电源 | 5V/2A电源适配器 | 1 |
| 显示模块(可选) | OLED 0.96英寸 I²C | 1 |
二、硬件焊接与连接步骤
1. 超声波模块(HC-SR04)焊接
- 接线定义:
VCC→ 5VTRIG→ 单片机IO口(如PA0)ECHO→ 单片机IO口(如PA1)GND→ GND
- 焊接要点:
- 使用细焊锡丝,避免引脚间短路
- 引脚加热时间不超过3秒,防止损坏传感器
2. 舵机(SG90)连接
- 接线定义:
- 红色(VCC)→ 5V
- 棕色(GND)→ GND
- 橙色(SIGNAL)→ 单片机PWM口(如PA2)
- 固定方式:
- 用M2螺丝将超声波模块固定在舵机摆臂上
- 确保超声波探头朝向正前方
3. 主控板供电处理
- 若使用大扭矩舵机,需外接5V电源:
- 舵机VCC/GND接外部电源
- 主控板GND与外部电源GND共地
4. OLED显示模块(可选)
- I²C接口连接:
SDA→ 单片机SDA(如PB7)SCL→ 单片机SCL(如PB6)
三、关键代码实现(Arduino示例)
#include <Servo.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define TRIG_PIN PA0
#define ECHO_PIN PA1
#define SERVO_PIN PA2
Servo radarServo;
Adafruit_SSD1306 oled(128, 64, &Wire);
void setup() {
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
radarServo.attach(SERVO_PIN);
oled.begin(SSD1306_SWITCHCAPVCC, 0x3C);
oled.clearDisplay();
}
void loop() {
for (int angle = 0; angle <= 180; angle += 10) { // 每10度扫描一次
radarServo.write(angle);
delay(50);
float distance = getDistance();
// OLED显示数据
oled.clearDisplay();
oled.setTextSize(1);
oled.setCursor(0,0);
oled.print("Angle: " + String(angle));
oled.setCursor(0,20);
oled.print("Dist: " + String(distance) + "cm");
oled.display();
}
}
float getDistance() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
long duration = pulseIn(ECHO_PIN, HIGH);
return duration * 0.034 / 2; // 声速换算(cm)
}四、调试与优化技巧
-
抗干扰处理:
- 在VCC和GND间并联100μF电容,稳定舵机电压
- 超声波ECHO引脚串联1kΩ电阻防止过压
-
数据滤波算法:
// 中值滤波示例(连续采样5次取中间值) float stableDistance() { float samples[5]; for (int i=0; i<5; i++) { samples[i] = getDistance(); delay(10); } sort(samples, 5); // 排序数组 return samples[2]; // 返回中值 } -
雷达扫描优化:
- 在障碍物密集区域缩小扫描步进角(如5°)
- 使用加速度插值算法让舵机转动更平滑
五、常见问题解决
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 超声波返回0 | 接线错误或超出测距范围 | 检查Trig/Echo是否反接 |
| 舵机抖动卡顿 | 电源功率不足 | 外接5V电源单独供电 |
| OLED不显示 | I²C地址错误 | 扫描地址(常用0x3C/0x3D) |
| 数据跳变严重 | 环境噪声干扰 | 添加软件滤波+减小采样间隔 |
六、进阶扩展方向
- 通过串口通信将数据发送至上位机软件(如Processing)生成雷达图
- 添加蓝牙模块(HC-05)实现手机APP监控
- 结合PID控制算法实现自动避障小车
? 关键安全提示:
- 焊接时佩戴防静电手腕带
- 舵机运行时勿用手强制阻挡
- 避免超声波模块长时间工作在潮湿环境
通过以上步骤,可完成一个基础的单片机超声波雷达系统。实际应用中需根据具体场景调整扫描频率和数据处理算法。建议先用面包板搭建测试电路,稳定后再进行焊接固化。
基于单片机的超声波测距系统实现
文章目录1 简介2 主要器件3 实现效果4 设计原理4.1 声波雷达原理5 部分实现代码6 最后1 简介Hi,大家好,这里是丹成学长,今天向大家介绍一个学长做的
2021-11-10 08:53:35
利用AT89C51单片机、超声波传感器测距实现超声波倒车雷达
电子发烧友网站提供《利用AT89C51单片机、超声波传感器测距实现超声波倒车雷达
资料下载
![]() 王树林
2023-11-17 15:47:00
王树林
2023-11-17 15:47:00
基于单片机的超声波测距
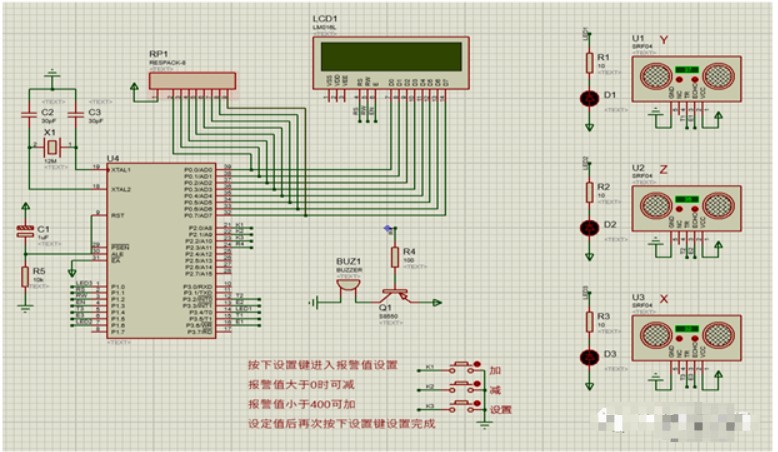
设计简介:本设计是基于单片机的超声波测距系统,主要实现以下功能:可通过LCD1602显示温度、距离和最小距离; 可通过按键设置最小距离; 可通过蜂鸣器和LED进行不同频率的声光报警;标签:51
资料下载
![]() 手托初梦
2021-11-12 15:06:00
手托初梦
2021-11-12 15:06:00
使用STM32单片机和51单片机实现HC04超声波测距模块的程序免费下载
本文档的主要内容详细介绍的是使用STM32单片机和51单片机实现HC04超声波模块测距的程序免费下载。
资料下载
![]() 佚名
2019-08-21 17:31:00
佚名
2019-08-21 17:31:00
7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- dtmb信号覆盖城市查询
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105