

数字电源pid设计
更多
设计数字电源的PID控制器需结合离散化控制理论与实际调试,以下是关键步骤和注意事项:
1. PID基础与离散化
- 连续PID公式:
( u(t) = K_p e(t) + K_i \int e(t) dt + K_d \frac{de(t)}{dt} ) - 离散化方法:
将时间离散为采样周期( T ),采用后向差分法或双线性变换。- 位置式PID(直接实现):
( u(k) = K_p e(k) + Ki T \sum{j=0}^k e(j) + K_d \frac{e(k)-e(k-1)}{T} ) - 增量式PID(计算控制量增量):
( \Delta u(k) = K_p [e(k)-e(k-1)] + K_i T e(k) + K_d \frac{e(k)-2e(k-1)+e(k-2)}{T} )
( u(k) = u(k-1) + \Delta u(k) )
- 位置式PID(直接实现):
2. 设计步骤
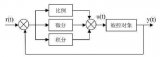
a. 确定系统模型
- 建立电源的数学模型(如传递函数),涉及LC滤波器、开关器件动态特性等。
- 若模型未知,可通过阶跃响应实验或频域分析进行系统辨识。
b. 选择采样周期
- 采样频率应高于系统带宽的10倍以上(Nyquist定理)。
- 典型开关电源频率在kHz~MHz级,采样周期需适配(如1/10开关周期)。
c. 参数整定
- 试凑法:
- 设( K_i=0, K_d=0 ),增大( K_p )至系统出现临界振荡。
- 加入( K_i )消除稳态误差,但避免积分饱和。
- 加入( K_d )抑制超调,减少振荡。
- Ziegler-Nichols法:
- 找临界增益( K_u )(等幅振荡时的( K_p ))和周期( T_u )。
- 按经验公式:( K_p=0.6K_u, K_i=K_p/(0.5T_u), K_d=K_p \cdot 0.125T_u )。
- 频域法:通过Bode图分析相位裕度(建议45°~60°),调整参数。
d. 抗饱和与滤波
- 积分抗饱和:限制积分项幅值,或采用积分分离(误差大时暂停积分)。
- 微分滤波:对微分项加一阶低通滤波器,抑制高频噪声。
e. 硬件实现
- 选择MCU/DSP,确保计算速度足够(如STM32、C2000系列)。
- 优化代码减少计算延迟,确保在一个采样周期内完成运算。
- 配置高分辨率PWM(如16位)以提高输出精度。
3. 注意事项
- 噪声抑制:在采样环节加入数字滤波器(如移动平均、低通滤波)。
- 量化误差:使用32位浮点或高精度定点数运算。
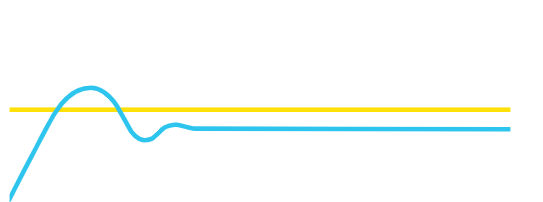
- 稳定性验证:通过阶跃响应测试超调、调节时间,频域分析相位裕度。
- 多工况测试:验证负载突变、输入电压波动等场景下的鲁棒性。
4. 调试工具
- 使用示波器观测输出波形(如动态响应、稳态误差)。
- 借助MATLAB/Simulink进行离散系统仿真,验证参数合理性。
- 实时监测变量(如误差、积分项)以定位问题。
示例代码框架(位置式PID)
float Kp, Ki, Kd, T; // 参数与采样周期
float error, prev_error, integral, derivative;
void PID_Update(float setpoint, float measurement) {
error = setpoint - measurement;
integral += error * T;
derivative = (error - prev_error) / T;
float output = Kp * error + Ki * integral + Kd * derivative;
prev_error = error;
// 输出限幅和抗饱和处理
apply_limits(&output, &integral);
set_pwm(output); // 更新PWM占空比
}通过系统建模、离散化设计、参数整定和实验调试,可实现高性能数字电源PID控制。需注意理论与实践结合,逐步优化参数以满足动态响应和稳定性的平衡。
带PID的数字输出控制示例解析
如果PID控制的输出是数字的,例如继电器或电磁阀,则可以使用脉宽调制等技术将数字输出有效地转换为模拟输出。PWM频率根据应用来选择,并且取决于系
2023-11-28 12:25:10
数字PID调节器在simulink中是对应discrete PID controller吗?
数字PID调节器在simulink中是对应discrete PID controller吗?
2023-03-17 11:24:06
数字PID控制的原理
数字PID控制的原理 自从计算机和各类微控制器芯片进入控制领域以来,用计算机或微控制器芯片取代模拟 PID控制电路组成控制系统,不仅可以用软件实
2023-03-09 14:23:12
安合科技BB4808G4数字电源开发板免费试用
本开发板是基于STM32G474控制的四开关BUCK-BOOST数字电源,可以实现降压、升压、电流反向控制。PWM,ADC,PID控制,
2020-02-10 15:53:13
7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- amoled屏幕和oled区别
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
- 元宇宙概念龙头股一览
湘ICP备2023036445号-105