

软体机器人
好的!软体机器人(Soft Robots)是一种由柔性、可变形材料(通常是硅胶、橡胶、聚合物凝胶等) 制成的机器人,与传统刚性机器人(金属、硬塑料构成)相比,具有高度的柔顺性和适应性。
以下是关于软体机器人的详细介绍:
-
核心特征:柔性
- 材料柔软: 主要使用弹性模量低的材料,像生物组织一样可以弯曲、拉伸、扭转。
- 结构连续可变: 运动方式基于材料的连续变形,而不是依靠刚性关节的离散转动。
- 内在顺应性: 在与环境(包括人)接触时能自然变形,吸收冲击力,安全性高。
-
驱动方式(如何让软体动起来):
- 气动驱动: 最常见的方式。通过向机器人内部的空腔(气动网络)泵入或抽出空气(或其他气体)来使其膨胀、收缩或弯曲。类似“吹气球”的原理。
- 液压驱动: 与气动类似,但使用不可压缩的液体(如水、油),能提供更大的力,但系统更复杂、更重。
- 形状记忆合金: 利用某些金属合金(如镍钛合金)在加热时恢复预设形状的特性来产生运动或力。响应较慢,但力量密度高。
- 介电弹性体: 在柔软的弹性体薄膜两侧施加高电压,薄膜会在静电力作用下变薄并面积扩张。可实现快速、大应变变形。
- 热/光/磁响应材料: 利用材料对温度、光、磁场等外部刺激的响应特性来驱动变形。仍在研究中。
- 化学反应驱动: 利用材料内部的化学反应(如膨胀)产生运动。生物相容性好,但控制较难。
-
传感:
- 由于材料的柔软和连续变形,在软体中集成传统刚性传感器(如应变片)非常困难。
- 常用方法包括:
- 嵌入式柔性传感器: 如液态金属(镓铟锡合金)应变传感器、导电弹性体传感器、光纤传感器(测量光信号变化推断变形)。
- 外部视觉/运动捕捉: 通过摄像头追踪机器人上的标记点来测量其姿态和变形。
- 本体感受: 通过测量驱动状态(如腔体内的气压/液压)来间接推断变形(但这不准确且受负载影响)。
-
控制与建模:
- 建模困难: 软材料的非线性力学行为(大变形、粘弹性、超弹性)使得建立精确的数学模型非常复杂。
- 控制挑战: 精确控制连续体的形状和力输出比控制离散关节困难得多。常用方法包括开环控制(预设驱动模式)、基于简化模型的控制、基于机器学习的控制(如图像反馈控制)。
-
优势:
- 安全性高: 与人类、易碎物品交互时风险低,适用于近距离人机协作、医疗、康复等领域。
- 环境适应性强: 能挤过狭小空间、在不规则表面移动、适应复杂多变的环境(如废墟搜救、管道检测、深海探测)。
- 多功能性: 单一软体结构可实现抓取、蠕动、游动、跳跃等多种动作。
- 仿生效果好: 更容易模拟章鱼触手、蠕虫、象鼻等自然界中柔性生物的运动和功能。
- 低成本潜力: 制造材料相对廉价,某些制造方法(如3D打印、铸造)适合批量生产。
-
挑战:
- 力量与速度: 通常不如刚性机器人有力、快速(液压驱动能提供较大力)。
- 精确控制与定位: 精确控制其形状和末端执行器的位置是重大挑战。
- 耐用性与可靠性: 柔性材料易磨损、老化、被刺穿(尤其是气动/液压驱动)。
- 传感集成难度: 可靠地将传感器无缝集成到软体结构中仍是难题。
- 能源与驱动系统: 气动/液压系统需要外部泵和阀门,限制了机器人的便携性和独立性。
- 建模与仿真: 缺乏高效准确的仿真工具用于设计和预测性能。
-
应用领域:
- 医疗与康复: 手术机器人(更安全地接触组织)、内窥镜/导管、康复外骨骼/矫形器、假肢(更舒适)。
- 探索与搜救: 在废墟、管道、狭窄空间、水下等复杂环境中进行探测和搜救。
- 人机交互与服务: 安全的协作机器人、辅助老年人/残疾人的机器人、互动玩具。
- 抓取与操作: 抓取不规则、易碎或形状多变的物体(如水果、精密仪器)。
- 仿生机器人: 模仿章鱼、蠕虫、鱼、昆虫等的运动和行为。
- 可穿戴设备: 集成在服装上的传感器或驱动器。
-
未来方向:
- 新型智能材料: 开发集驱动、传感、计算甚至能量收集于一体的多功能材料。
- 更先进的建模与控制: 利用人工智能(特别是强化学习、深度学习)改进控制和状态估计。
- 嵌入式能源与驱动: 发展更紧凑、高效的便携式驱动和能源解决方案(如化学能驱动)。
- 制造技术: 提升多材料、嵌入式传感/电子元件的软体机器人制造工艺。
- 提高可靠性: 增强材料的耐用性和自我修复能力。
简单来说,软体机器人就像是“活”的橡胶或硅胶结构,能像生物组织一样安全地弯曲、变形、与环境互动。虽然控制它们很困难,但它们在需要安全性、适应性和仿生能力的领域有着巨大的潜力。 例如,想象一个像章鱼触手一样柔软灵活,能安全地从一堆鸡蛋中拿起单个鸡蛋的机械手,这就是软体机器人的魅力所在。


基于形状记忆合金的软体机器人研究分析
近年来,形状记忆合金( shape memory alloy,SMA)由于噪声小、回复应变大和生物兼容性妤等优点,得到了广泛的使用和研究。为了研究SMA在软体机器人领域的应用,首先对SMA在国内外
资料下载
佚名
2021-06-18 10:52:36
基于DSP和PC的农业机器人控制系统
智能化农业机饿是本世纪农业机械的发展趋势,本论文分析了农业机器人特点、国内外的研究和应用现状,指出影响农业机器人应用的问题在于:农业机器人成本过
资料下载
佚名
2021-05-19 09:48:21

基于振动驱动的旋转及攀爬软体机器人的研究
旋转软体机器人具有可实现大变形、柔性接触、人体友好等特性,在移动机器人、生物医学器件等领域具有重要的应用价值。本文主要设计并制作了压电振动驱动的
2022-03-10 14:25:02
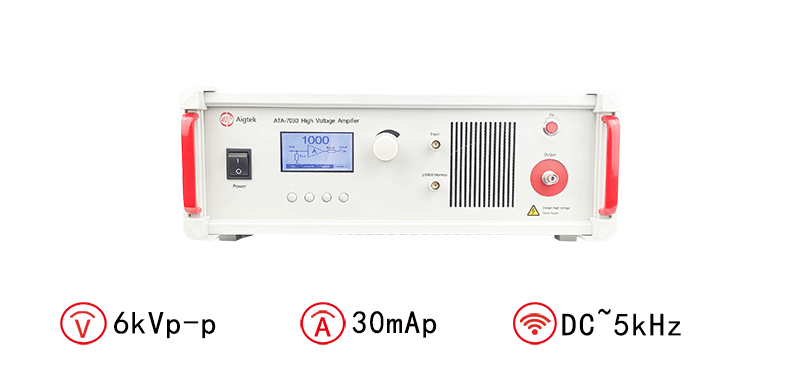
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究
实验名称:基于振动驱动的旋转及攀爬软体机器人的研究研究方向:利用振动驱动原理,设计了能够实现快速旋转运动和攀爬运动的两种软体驱动结构。实验内容:
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究
实验名称:基于振动驱动的旋转及攀爬软体机器人的研究研究方向:利用振动驱动原理,设计了能够实现快速旋转运动和攀爬运动的两种软体驱动结构。实验内容:
软体机器人能够延展和操控自己形状 拥有传统机器人没有的优势
软体机器人属于一个新的领域,它可能在诸如外科手术等领域发挥重要作用(手术时的纳米机器人需要在人体内部移动而不损伤软组织)。
2019-11-25 10:32:21
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- amoled屏幕和oled区别
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105