

stm32做飞控
使用 STM32 开发飞控系统(飞行控制器)是无人机领域的常见方案,因其高性能、低功耗和丰富的外设资源。以下是开发飞控的关键步骤和技术要点:
一、硬件选型
-
主控芯片
- 推荐型号:STM32F4/F7/H7 系列(如 STM32F405/F746/H743),需满足以下特性:
- 高主频(≥180MHz,H7可达400MHz+)
- 硬件浮点单元(FPU)
- 足够的RAM(≥256KB)和Flash(≥1MB)
- 多路定时器(PWM输出/输入捕获)、ADC、SPI/I2C/UART接口。
- 推荐型号:STM32F4/F7/H7 系列(如 STM32F405/F746/H743),需满足以下特性:
-
传感器模块
- IMU(惯性测量单元):MPU6050/MPU9250(6轴/9轴,含加速度计+陀螺仪+磁力计)
- 气压计:MS5611/BMP280(高度测量)
- 磁力计:HMC5883L/QMC5883(航向校准,需远离电机干扰)
- GPS模块:支持UBX协议的U-blox模块(如NEO-M8N,用于定位和导航)
- 超声波/TOF传感器(可选,用于低空定高或避障)。
-
通信与接口
- 遥控器信号输入:PPM/PWM或SBUS协议(通过UART或专用接收机)
- 电调控制:PWM/Dshot协议(通过定时器输出)
- 无线数传:ESP8266/ESP32(WiFi)或NRF24L01(2.4GHz)
- 调试接口:SWD/JTAG(ST-Link调试器) + UART(日志输出)。
-
电源管理
- 电池电压检测(分压电路 + ADC采集)
- 5V/3.3V稳压电路(为MCU和传感器供电)
- 反接保护和滤波电路。
二、软件架构
-
实时操作系统(RTOS)
- 使用 FreeRTOS 或 RT-Thread 实现多任务调度(如传感器数据读取、控制算法、通信等任务)。
-
传感器数据融合
- 姿态解算:通过卡尔曼滤波、互补滤波或Mahony算法,融合陀螺仪/加速度计/磁力计数据,计算四元数或欧拉角。
- 高度估计:融合气压计和加速度计数据(或超声波)。
- GPS定位:解析NMEA协议,获取经纬度和速度。
-
控制算法
- PID控制器:实现姿态控制(Roll/Pitch/Yaw)和高度/位置控制。
- 混控逻辑:将控制量分配到电机(四轴、六轴等不同机型)。
- 导航算法:基于GPS的航点追踪或返航逻辑。
-
通信协议
- 与地面站通信:MAVLink协议(常用)或自定义协议。
- 遥控器信号解码:解析SBUS/PPM信号。
- 电调控制:支持Dshot(数字协议)或PWM信号。
三、开发工具
-
IDE
- Keil MDK(商业软件)
- STM32CubeIDE(免费,集成HAL库)
- PlatformIO(基于VS Code,适合开源项目)。
-
调试工具
- ST-Link或J-Link下载器
- Logic Analyzer(分析PWM/SBUS信号)
- UART串口助手(查看日志)。
-
仿真与测试
- 使用硬件在环(HIL)工具(如MATLAB/Simulink + STM32插件)验证控制算法。
- 实际飞行前通过摇杆或API模拟输入信号测试稳定性。
四、关键注意事项
- 实时性:控制周期需≤1ms(1kHz频率),确保快速响应。
- 传感器校准:开机时校准陀螺仪零偏和加速度计水平。
- 抗干扰设计:
- 电源和信号线隔离(避免电机噪声影响传感器)。
- PCB布局时分离数字与模拟电路。
- 安全机制:
- 失控保护(信号丢失时自动悬停或降落)
- 低电压报警与自动返航。
五、开源参考项目
- Betaflight:专为竞速无人机设计的飞控(基于STM32F4/F7)。
- PX4:支持多旋翼/固定翼的飞控平台,可移植到STM32。
- ArduPilot:成熟的开源飞控方案(部分硬件基于STM32)。
六、快速入门步骤
- 使用STM32CubeMX初始化时钟、外设(SPI/I2C/UART)。
- 编写传感器驱动(如MPU6050的I2C读取)。
- 实现姿态解算算法(如Mahony滤波)。
- 设计PID控制器并调试参数(先分步调Roll/Pitch,再调Yaw)。
- 通过地面站(如Mission Planner)监控飞行数据。
通过以上步骤,结合硬件设计和算法优化,可以构建一个稳定可靠的STM32飞控系统。实际开发中需重点关注传感器精度、控制算法鲁棒性和系统实时性。
STM32L071做时钟配置成32M的话,系统就会在执行时钟切换时跑飞的原因?
最近在用STM32L071这个片子,做时钟配置的时候发现PLLVCO最大只能配置到16M,配成32M的话,系统就会在执行时钟切换时跑飞,于是我想
使用STM32 HRTIM的Fault事件做输出保护
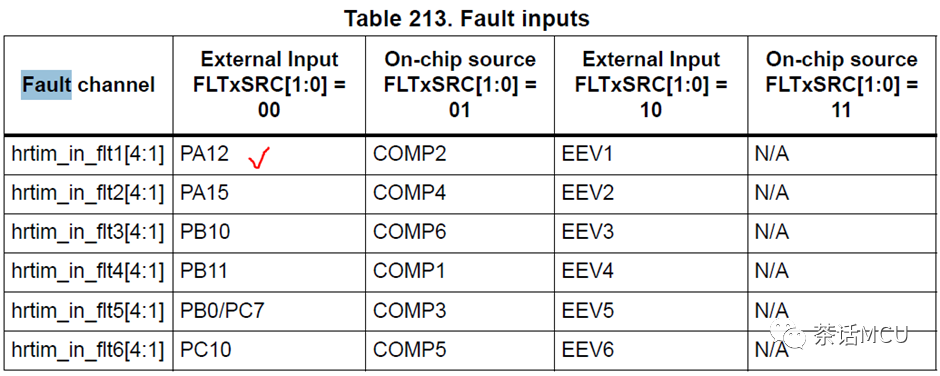
有人想使用STM32 HRTIM的Fault事件做输出保护,借助CubeMx配置时有些人往往缺这少那的。这里就演示一下HRTIM的使用Fault保护的配置过程,以供参考。使用
2023-09-09 15:26:53
STM32F103飞线连接ST-li
”的状态,非常难以定位。硬件工程师最好别这样干,如果真的遇到这种情况,请按我的实际经历来飞线设计,也能临时解决问题,不用等做新板子。这次遇到的问题是这样的:S
资料下载
![]() 20762
2021-12-07 10:36:05
20762
2021-12-07 10:36:05
基于STM32的四轴飞行器飞控系统设计资料下载
电子发烧友网为你提供基于STM32的四轴飞行器飞控系统设计资料下载的电子资料下载,更有其他相关的电路图、源代码、课件教程、中文资料、英文资料、参考设计、用户指南、解决方案等资料,希望可以帮助到广大的电子工程师们。
资料下载
![]() 佚名
2021-04-25 08:43:25
佚名
2021-04-25 08:43:25
基于STM32设计的四轴飞行器飞控系统资料下载
电子发烧友网为你提供基于STM32设计的四轴飞行器飞控系统资料下载的电子资料下载,更有其他相关的电路图、源代码、课件教程、中文资料、英文资料、参考设计、用户指南、解决方案等资料,希望可以帮助到广大的电子工程师们。
资料下载
![]() 佚名
2021-04-24 08:51:50
佚名
2021-04-24 08:51:50
STM32飞控的电路原理图和PCB库及物料清单和源代码资料合集
本文档的主要内容详细介绍的是STM32飞控的电路原理图和PCB库及物料清单和源代码资料合集。
资料下载
![]() 孤舟蓑笠翁22
2020-06-03 08:00:00
孤舟蓑笠翁22
2020-06-03 08:00:00
基于cleanflight来搭建STM32飞控的开发环境
ubuntu下开发基于STM32芯片的飞控stm32的开发在windwos环境下可以使用比较省事的MDK,基于keil的界面,但可能是因为软件开
基于STM32四轴飞控制作资料分享
这里写自定义目录标题基于STM32四轴飞控制作笔记新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容
基于STM32F7系列单片机的飞控
从2009年到现在,我从事无人机研发将近11年了,中途设计过很多飞控,有闭源的无人飞艇飞控、大型固定翼无人机飞控,也有在开源
基于stm32飞控做一个小四轴
今天介绍一个小玩意是一个开源小四轴。我考虑过基于之前做的stm32飞控来做一个小四轴,对于新手来说比较安全,然后就上网找一样芯片的小四轴看看能不
关于STM32 ST-LINK Utility查看内核运行状态,助你判断程序是否跑飞
利用STM32 ST-LINK Utility查看内核运行状态,助你判断程序是否跑飞
2020-03-12 09:58:05
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- amoled屏幕和oled区别
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105