

双极性spwm stm32
双极性SPWM(正弦脉宽调制)在STM32上的实现通常涉及全桥逆变电路的控制,通过STM32的定时器生成互补的PWM信号,并插入死区时间以防止桥臂直通。以下是关键步骤和注意事项:
1. 硬件需求
- STM32系列MCU:推荐使用带高级定时器(如TIM1/TIM8)的型号(如STM32F4/F7/H7),支持互补输出和死区插入。
- 逆变电路:全桥拓扑(H桥),由4个开关管(MOSFET/IGBT)组成。
- 驱动电路:如IR2110等栅极驱动器,确保PWM信号能驱动开关管。
2. 关键配置步骤
(1) 定时器配置
-
选择定时器模式
- 使用中央对齐模式(Center-Aligned Mode),使计数器先递增到ARR值,再递减到0,生成对称PWM。
- 设置预分频器(PSC)和自动重载值(ARR),决定PWM频率。例如:
- 若主频为84MHz,PSC=83,ARR=999,则PWM频率为:
[ f_{PWM} = \frac{84\ \text{MHz}}{(PSC+1) \times (ARR+1) \times 2} = \frac{84\ \text{MHz}}{84 \times 1000 \times 2} = 500\ \text{Hz} ]
- 若主频为84MHz,PSC=83,ARR=999,则PWM频率为:
-
配置互补通道
- 启用PWM通道(如CH1/CH1N和CH2/CH2N),并设置极性(高电平有效或低电平有效)。
- 插入死区时间(Dead Time),防止上下管直通。死区时间通过
BDTR寄存器的DTG[7:0]位设置,需根据开关管特性计算。
(2) 生成正弦调制表
-
计算正弦表
-
生成一个正弦波数组,长度通常为200~500点(影响输出波形分辨率)。
#define SIN_TABLE_SIZE 200 uint16_t sin_table[SIN_TABLE_SIZE]; float modulation_index = 0.8; // 调制比(0~1) for (int i = 0; i < SIN_TABLE_SIZE; i++) { float angle = 2 * PI * i / SIN_TABLE_SIZE; sin_table[i] = (uint16_t)((sin(angle) * modulation_index + 1) * ARR / 2); }
-
-
DMA传输
- 使用DMA将正弦表数据自动传输到定时器的CCR寄存器,减轻CPU负担。
HAL_DMA_Start(&hdma_tim1, (uint32_t)sin_table, (uint32_t)&TIM1->CCR1, SIN_TABLE_SIZE); HAL_TIM_PWM_Start_DMA(&htim1, TIM_CHANNEL_1, (uint32_t*)sin_table, SIN_TABLE_SIZE);
- 使用DMA将正弦表数据自动传输到定时器的CCR寄存器,减轻CPU负担。
(3) 实时更新占空比
- 在定时器更新中断或DMA传输完成中断中,循环更新正弦表索引,实现连续调制。
3. 代码示例(基于HAL库)
// 定时器初始化(以TIM1为例)
TIM_HandleTypeDef htim1;
TIM_OC_InitTypeDef sConfigOC = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 83;
htim1.Init.CounterMode = TIM_COUNTERMODE_CENTERALIGNED1;
htim1.Init.Period = 999; // ARR值
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim1);
// 配置PWM通道
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0; // 初始占空比
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1);
// 使能互补输出和死区时间
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
__HAL_TIM_SET_DEADTIME(&htim1, 100); // 死区时间 = 100ns(根据实际需求调整)
// 启动PWM和DMA
HAL_TIM_PWM_Start_DMA(&htim1, TIM_CHANNEL_1, (uint32_t*)sin_table, SIN_TABLE_SIZE);4. 注意事项
-
死区时间计算
死区时间需大于开关管的开启/关断延迟,可通过公式估算:
[ \text{Dead Time} = T{d_fall} + T{d_rise} + \text{Margin} ] 具体值需通过示波器调试确定。 -
调制比限制
调制比(Modulation Index)通常不超过1,否则会导致过调制,波形失真。 -
PWM频率选择
根据负载特性选择PWM频率,一般逆变器应用中为10kHz~20kHz(避免高频噪声和开关损耗的平衡)。 -
实时性优化
使用DMA或TIM触发DAC可实现更高精度的SPWM,避免中断延迟影响波形质量。
通过以上步骤,可在STM32上实现双极性SPWM控制,适用于逆变器、电机驱动等应用。实际调试时需结合示波器观察输出波形,优化死区时间和调制参数。
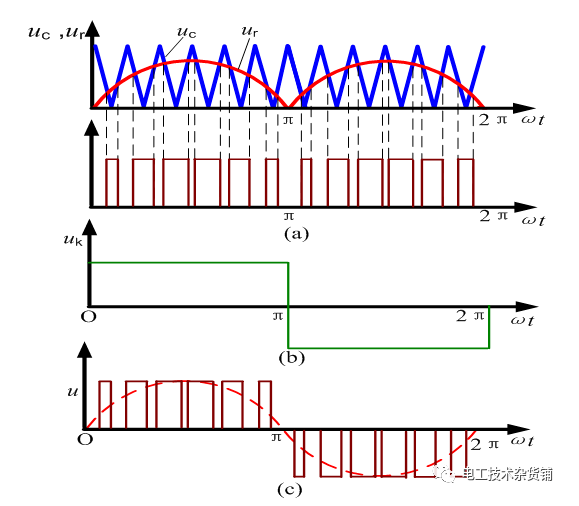
SPWM的单极性和双极性
单极性双极性只包含了正弦信号正半周或负半周的信息既包含了正弦信号正半周的信息,又包含了负半周的信息一般用推挽或全桥一般用于半桥反应在推挽上反应在
资料下载
![]() h1654155275.0032
2021-11-08 14:51:02
h1654155275.0032
2021-11-08 14:51:02

单极性PWM模式与双极性PWM模式到底是什么
pwm是脉冲调制技术,对于pwm,我们或多或少有所了解。在前文中,小编对pwm控制原理、spwm控制原理有所介绍。为增进大家对pwm技术的了解程度,本文将对单极性pwm模式以及
2021-02-15 17:37:00
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 如何进行编码器的正确接线?接线方法介绍
- 什么是场效应管?它的作用是什么?
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- amoled屏幕和oled区别
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 苹果笔记本macbookpro18款与19款区别
- 通讯隔离作用
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105