

威纶通 485 多个伺服驱动器
好的,了解。在威纶通 (Weintek) HMI(触摸屏)上通过RS-485 总线连接并控制多个伺服驱动器,是一个非常典型且实用的工业自动化应用。
这里有几个关键点和步骤指南(中文):
? 核心概念
-
主从架构:
- 主站 (Master): 威纶通 HMI 作为整个总线上的唯一主站。
- 从站 (Slave): 每个伺服驱动器都被配置为一个从站。
- 通信规则: HMI 主站主动轮询(发送指令给)各个伺服驱动器从站。从站只能在收到主站请求后才回复数据。
-
物理连接 (RS-485):
- 使用屏蔽双绞线(推荐)连接所有伺服驱动器的 RS-485 通信端子。
- HMI 的 RS-485 端口 (通常标记为 COMx+, COMx- 或 Tx+/Rx+, Tx-/Rx-) 连接到总线的一端。
- 各伺服驱动器的 RS-485 端口 (标记通常类似:485A/485+, 485B/485-, SG/GND) 并联接入总线。
- 严格遵守极性:
HMI+(COMx+) -> 所有驱动器+(485A/485+),HMI-(COMx-) -> 所有驱动器-(485B/485-)。一般驱动器的 GND/SG 端子也需要连接到一起。 - 在总线的最远端(距离 HMI 最远的驱动器处)连接一个 120Ω 终端电阻(Terminating Resistor)以抑制信号反射。
- 保证总线长度在允许范围内(通常 1200 米以内),并尽量减少分支。
-
通信协议:
- 绝大多数伺服驱动器通过 RS-485 与 HMI 通信使用的是 MODBUS RTU 协议。这是工业领域最常见的标准协议。
- 威纶通 HMI 内置了 MODBUS RTU 主站驱动。
- 少数驱动器可能使用其私有协议,但 MODBUS 是最通用、最可靠的选择。务必查阅你的伺服驱动器手册确定其支持的通信协议。
? 配置步骤 (关键!)
步骤 1: 配置每个伺服驱动器
- 分配唯一从站地址 (站号): 这是最重要的一步!每个驱动器在同一个 RS-485 总线上必须有不同的地址。地址范围为 1 到 247 (Modbus RTU)。常见做法是从 1 开始顺序编号。? 通常在驱动器的参数菜单里设置(如 PnXXX / CnXXX)。
- 设置一致的通信参数: 所有驱动器和 HMI 的通信参数必须完全相同:
- 波特率(Baud Rate): 9600, 19200, 38400, 57600, 115200 等(根据距离和干扰选择,通常 19200 或 38400)。
- 数据位(Data Bit): 通常是 8。
- 停止位(Stop Bit): 通常是 1。
- 校验位(Parity): None(无), Even(偶校验), Odd(奇校验)。无校验 搭配 停止位=2 也是常见配置。必须统一。
- 选择协议: 确保驱动器设置为MODBUS RTU通信模式(如果支持)。? 在驱动器的通信协议选择参数里设置。
- 查找 MODBUS 寄存器映射: 这是另一关键!你需要查阅伺服驱动器的用户手册或通信手册,找到其MODBUS 寄存器地址表。这份表格会告诉你:
- 控制哪个功能(如:启动/停止、速度设定值、当前位置、报警代码)对应哪个 MODBUS 寄存器地址(如:0x2001, 0x3001)和数据类型(如:16位整数、32位整数)。
- 该寄存器是只读(Read-Only)还是可读写(Read-Write)。
步骤 2: 在威纶通 EasyBuilder Pro 软件中配置
- 创建新工程或打开现有工程: 选择正确的 HMI 型号。
- 添加 MODBUS RTU 驱动:
- 进入
系统设置->设备列表->新增。 - 在设备类型中选择 MODBUS RTU。
- 选择正确的 COM 端口(对应你连接了 RS-485 的物理端口)。
- 配置通信参数: 将波特率、数据位、停止位、校验位设置成步骤 1.2 中驱动器设置的值。✅
- 站号设置: HMI 作为主站,通常不需要设置自己的站号(有些驱动可能需要设为一个无效值如0或255)。关注点是驱动器的站号。
- 进入
- 添加从站设备(即你的伺服驱动器):
- 在同一个设备列表下,为每个伺服驱动器添加一个子设备。
- 这个子设备也选择 MODBUS RTU。
- 关键:为每个子设备设置其唯一的
站号(Station Address/ID)。这个站号必须和你在 步骤 1.1 中为该驱动器配置的地址完全一致。例如,驱动器1 -> 站号1, 驱动器2 -> 站号2... - 通常不需要重复设置通信参数(子设备会继承父设备的设置)。
- 创建标签 (Tags) 用于读写数据:
- 进入
元件->标签数据库->新增或编辑。 - 命名标签: 取有意义的名字(如
Drive1_SpeedSet,Drive2_ActualPosition)。 - 选择设备: 在下拉菜单中选择对应的子设备(例如,为标签
Drive1_SpeedSet选择Drive1 (站号1)那个设备)。 - 设置地址:
- 地址类型/区域: 根据手册指定寄存器地址的区域(常见类型):
- 0x Coil (Output/Discrete Output): 用于开关量控制(如:驱动器启停信号)。
- 1x Discrete Input (Input Status): 用于只读开关量状态(如:驱动器准备好信号、报警状态位)。
- 3x Input Register: 用于只读模拟量(如:当前速度、实际位置)。
- 4x Holding Register: 用于读写模拟量(如:速度设定值、位置设定值、控制模式选择、部分参数读写)和配置命令。? 这是最常用的控制寄存器区。
- 地址: 填写驱动器手册中该功能对应的 MODBUS 寄存器地址值(通常以十六进制表示)。注意软件可能要求十进制或者特定输入格式(如 PLC 地址
4x0001)。务必参考威纶通软件的帮助文档和驱动器手册格式。这是最容易出错的地方。 - 数据类型: 根据手册说明选择,例如:
16-Bit Unsigned (U16),16-Bit Signed (S16),32-Bit Float。注意有些32位数据可能需要占用两个连续的寄存器地址。
- 地址类型/区域: 根据手册指定寄存器地址的区域(常见类型):
- 设置读/写属性。
- 进入
步骤 3: 在 HMI 画面上创建控制/监控元件
- 绑定标签: 在画面上放置按钮(用于启停)、数值输入/显示框(用于设定/显示速度/位置)、指示灯(用于状态)等元件。
- 关联标签: 设置这些元件的属性,将它们与你在 步骤 2.4 中创建的对应驱动器的标签关联起来。例如:
- 按钮的
状态设置或切换开关功能关联到驱动器1的Coil地址(控制启停)。 - 数值输入框的
输入设定功能关联到驱动器2的Holding Register地址(设置速度值)。 - 数值显示框的
显示功能关联到驱动器3的Input Register地址(显示当前位置)。
- 按钮的
步骤 4: 下载程序并调试
- 将配置好的 HMI 程序下载到威纶通触摸屏。
- 连接好所有 RS-485 线路并上电。
- 在 HMI 上进行操作,观察驱动器响应。
- 使用威纶通 HMI 自带的 COM Port Monitor 或 Debug 工具(如果可用)可以捕获和分析实际的通信数据帧,这是诊断通信问题(如地址错误、参数不一致、寄存器地址错位)的利器。?
- 仔细核对配置:地址、波特率等参数、极性(接线)、终端电阻、标签地址映射。
? 常见问题及解决思路
- 所有驱动器都无响应:
- HMI COM口设置错误(波特率等)
- 总线接线错误(+/-接反、断路、短路)
- 终端电阻未接或损坏
- 物理 COM 口选择错误
- HMI 和设备未共地(或共地不良,尝试连接 SG/GND)
- 只有部分驱动器响应:
- 驱动器的站号冲突(重复)
- 个别驱动器通信参数设置错误
- 连接到该驱动器的线路有问题(接头松动、接触不良)
- 该驱动器的站号与 HMI 中配置的标签地址关联不匹配
- 可以读到信息但不能控制:
- 寄存器地址错误(将写命令发到了只读寄存器?)
- 数据类型不匹配
- 驱动器的控制模式或参数配置错误(如在位置模式下发速度指令)
- 数据不更新或更新慢:
- HMI 轮询时间设置过长(在设备属性里可以调整轮询间隔)
- 通信错误导致重传
- 通信不稳定、数据错误:
- 干扰(远离动力线,使用屏蔽线并良好接地)
- 波特率设置过高(长距离或干扰大时降低波特率)
- 终端电阻未接或位置不对
? 重要提示
- 手册是圣经: 威纶通 EasyBuilder Pro 的帮助文档和你的每个型号的伺服驱动器的用户手册和通信手册是成功集成的关键。所有参数设置(地址、寄存器地址、波特率、功能映射)都必须严格依据手册。尤其是驱动器的寄存器地址表,务必找到并理解。
- 先易后难: 建议先在总线上连接一台驱动器进行测试和配置,确认所有参数(地址、波特率、寄存器映射)正确无误、通信稳定后,再添加其他驱动器到总线上,并确保它们的站号是唯一的。
- 线缆与连接: RS-485 对线路要求较高,使用优质屏蔽双绞线并做好端接是稳定的基础。
按照这个框架和思路去配置和调试,你可以成功地用威纶通 HMI 通过 RS-485 总线控制多个伺服驱动器。祝调试顺利!?️?
Modbus485转profinet网关连接伺服主轴驱动器与PLC的具体应用

DriveServo200系列伺服主轴驱动器与PLC的配置案例,用到设备为西门子S7-1200PLC, 开疆智能Modbus485转profin
2023-10-24 13:40:42
Modbus485转profinet网关连接伺服主轴驱动器与PLC的具体应用

DriveServo200系列伺服主轴驱动器与PLC的配置案例,用到设备为西门子S7-1200PLC, 开疆智能Modbus485转profin
2023-10-24 11:26:36
PLC通过Modbus 485转Profinet网关连接日鼎伺服驱动器配置案例
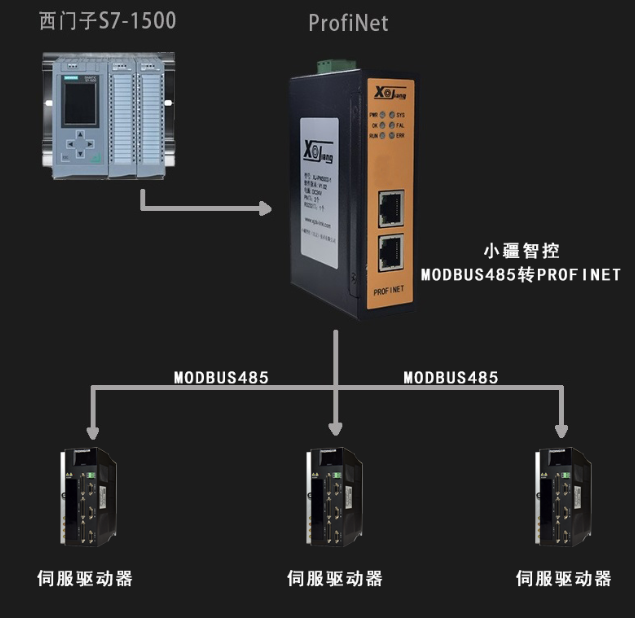
本案例是用小疆智控有限公司生产的Modbus 485转Profinet网关连接日鼎伺服驱动器与PLC的配置案例,用到设备为西门子S7-1500P
2023-05-10 17:08:38
PLC通过Modbus 485转Profinet网关连接日鼎伺服驱动器
本案例是用小疆智控有限公司生产的Modbus 485转Profinet网关连接日鼎伺服驱动器与PLC的配置案例,用到设备为西门子S7-1500P
资料下载
![]() 小疆智控
2023-05-18 10:19:06
小疆智控
2023-05-18 10:19:06
MODBUS 485转PROFINET连接松下伺服驱动器配置
本案例使用Modbus485转Profinet网关连接松下伺服驱动器与西门子PLC的配置案例,用到设备为西门子S7-1200PLC,Modbus
资料下载
![]() 北京开疆智能技术
2023-04-25 14:25:23
北京开疆智能技术
2023-04-25 14:25:23
MODBUS 485转PROFINET连接松下伺服驱动器配置案例

本案例使用Modbus485转Profinet网关连接松下伺服驱动器与西门子PLC的配置案例,用到设备为西门子S7-1200PLC,Modbus
2023-04-25 12:31:46
许昌回收西门子CPU模块回收台达驱动器伺服电机回收倍加福编码器,回收威纶触摸屏
联系方式131 7422 4750QQ 136836415许昌回收西门子CPU模块回收台达驱动器伺服电机回收倍加福编码器,回收
广东高价回收三菱模块回收伺服驱动器回收威纶通人机界面
驱动器,传感器等 回收三菱:FX3G, FX3GA , FX3SA系列PLC,Q系列模块,CPU,变频器,触摸屏,接触
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- dtmb信号覆盖城市查询
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105