

单片机串口驱动器
好的,关于单片机串口驱动器,我们用中文来解释一下这个概念及其关键组成部分:
核心概念:单片机串口驱动器
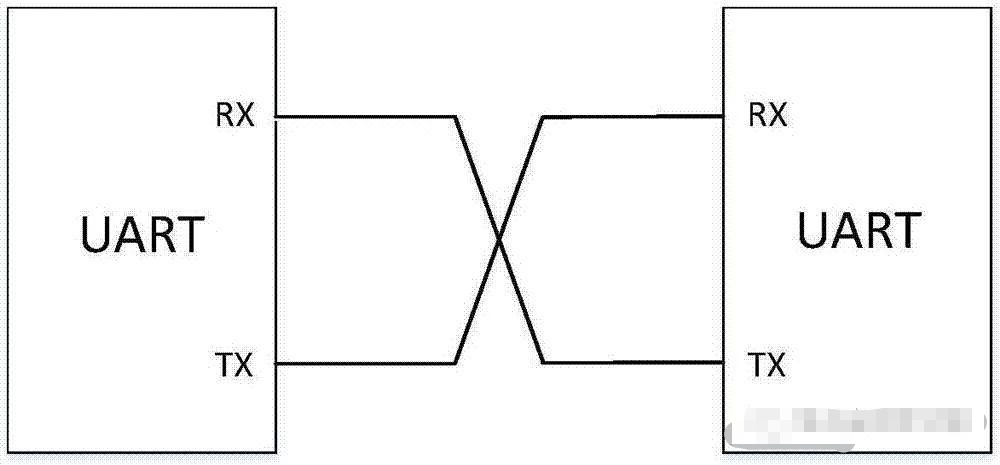
它指的是在单片机系统中,实现串行通信(UART)功能所需的软件和硬件模块。它扮演着将单片机内部处理的数据(并行格式)转换成串行比特流通过物理接口(如TX/RX引脚)发送出去,以及将接收到的串行比特流转换回单片机可处理的并行数据格式的角色。
可以将它理解为单片机与外界(其他单片机、PC、传感器、无线模块等)通过串行方式进行数据交换的“桥梁”或“翻译官”。
关键组成部分:
-
硬件部分 (UART 外设):
- 基础: 绝大多数现代单片机内部都集成有至少一个硬件 UART (Universal Asynchronous Receiver/Transmitter) 模块。这是驱动器的核心硬件实体。
- 功能模块:
- 波特率发生器 (Baud Rate Generator): 根据设定生成时钟信号,决定数据传输速度(如 9600, 115200 bps)。
- 发送器 (Transmitter): 将并行数据(写入发送数据寄存器)按位(Bit)串行化,通过 TX 引脚发送出去。处理起始位、数据位、校验位、停止位的添加。
- 接收器 (Receiver): 通过 RX 引脚接收串行数据,识别起始位,按位采样恢复数据,并进行校验检查(如果启用),最终将完整的并行数据存入接收数据寄存器,并可能产生中断。处理起始位检测、数据采样、校验、停止位检测。
- 控制和状态寄存器: 配置工作模式(波特率、数据位长度、停止位长度、奇偶校验、硬件流控)、控制发送/接收、反映状态(数据就绪、发送完成、错误标志:帧错误、溢出错误、噪声错误、校验错误)。
- 数据寄存器 (Buffer):
- 发送数据寄存器 (TXDR / UDRT / etc.):写入的数据会在这里被加载到发送移位寄存器进行串行化。
- 接收数据寄存器 (RXDR / UDRR / etc.):从接收移位寄存器恢复的完整数据字节会被放到这里供CPU读取。
-
软件部分 (串口驱动/库):
- 作用: 提供用户友好的接口(通常是函数或方法),让开发者可以方便地配置和使用硬件UART模块,而不必直接操作复杂的底层寄存器。它封装了初始化、发送、接收、中断服务等细节。
- 主要功能:
- 初始化 (UART_Init): 配置波特率、数据位(如8位)、停止位(如1位)、校验位(无/奇/偶)、硬件流控(RTS/CTS)、是否使能中断(接收完成、发送完成、错误)。
- 数据发送 (UART_SendChar, UART_SendString):
- 查询方式:查询状态寄存器确认发送数据寄存器或移位寄存器是否空闲,若空闲则写入数据到发送数据寄存器。
- 中断方式:写入数据到发送数据寄存器启动发送,然后触发中断(当发送移位寄存器准备好新数据或发送完成时)来处理下一个字节或清理状态。
- 数据接收 (UART_ReceiveChar, UART_Available):
- 查询方式:不断查询状态寄存器是否有接收数据就绪标志,有则读取接收数据寄存器。
- 中断方式:配置接收中断,当接收数据寄存器包含有效新数据时触发中断,在中断服务程序 (ISR) 中读取数据并将其存入软件缓冲区(环形缓冲队列 Ring Buffer)。用户通过非阻塞的
UART_ReceiveChar或UART_Available等函数访问缓冲区数据。
- 中断服务程序 (ISR): 处理UART引发的中断,如接收中断(读取数据、放入环形缓冲区)、发送中断(将环形缓冲区中的下一个字节写入发送数据寄存器,或标记发送完成)、错误中断(处理帧错误、溢出等)。
- 状态与错误处理: 提供检查状态(发送是否忙?接收缓冲区是否有数据?)和处理错误(获取错误标志)的函数。
- 缓冲区管理: 实现软件层面的发送和接收数据缓冲区(通常是环形缓冲区 Ring Buffer),用于解耦低速CPU和高速串行数据传输,避免数据丢失(特别是在中断驱动方式中至关重要)。
工作流程简述:
- 初始化配置: 软件通过驱动函数设置波特率、数据格式,使能需要的模块(发送、接收、中断)。
- 发送数据:
- 用户调用
UART_SendChar('A')或UART_SendString("Hello")。 - 驱动检查硬件状态是否就绪(查询)或管理发送缓冲区(中断)。
- 数据字节最终被写入硬件的发送数据寄存器。
- 硬件UART将数据从寄存器加载到发送移位寄存器,在波特率时钟控制下,从TX引脚一位一位地移出(低位在先 LSB First 居多),添加起始位、校验位(如配置)、停止位。
- 用户调用
- 接收数据:
- 硬件UART持续监测RX引脚。
- 检测到下降沿(起始位开始),开始按照波特率(通常过采样)对每一位数据进行采样。
- 数据位被移入接收移位寄存器。
- 所有位接收完成后(根据配置的数据位、校验位、停止位长度),硬件进行校验检查(如果配置),并检查停止位。
- 接收到的数据字节被放入接收数据寄存器,同时设置接收数据就绪标志。
- 软件通过查询标志位(在
UART_ReceiveChar内部调用)或响应接收中断,从接收数据寄存器读取数据。如果是中断驱动,数据在ISR中会被放入软件接收环形缓冲区供后续读取。
总结:
单片机串口驱动器 = 硬件UART外设 + 封装操作该硬件的软件库/驱动函数
它为开发者提供了标准化的、易用的API来实现单片机与外部世界的可靠串行通信。其核心任务是处理串行通信的底层细节(位时序、帧格式、硬件接口),让开发者只需关注发送什么数据和处理收到的数据。
常见关联术语:
- UART (通用异步收发器): 最常用的串行通信协议,硬件基础。
- USART (通用同步异步收发器): 支持UART和同步协议(如SPI/I2C的同步模式)。
- 波特率 (Baud Rate): 数据传输速率(位每秒)。
- 起始位、停止位、数据位、校验位: UART数据帧格式元素。
- 串口通信 (Serial Communication): 使用串行方式一位一位传输数据的总称。
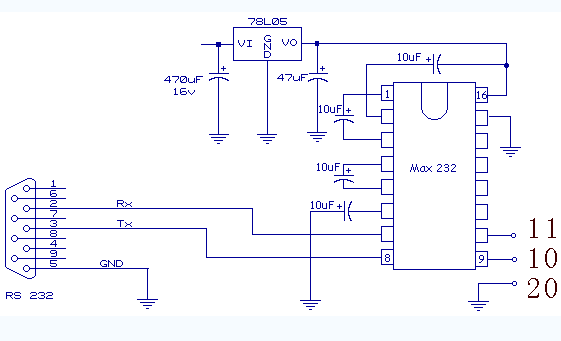
- RS-232/RS-485/ TTL Serial: 物理接口和电平标准。单片机通常是TTL电平(0V-Vcc, 如 0V=逻辑0,3.3V/5V=逻辑1)。驱动器负责TTL电平信号的生成与解析,电平转换芯片(如 MAX232, MAX485)负责将其转换为RS-232(±12V)或RS-485(差分信号)电平。
理解并熟练掌握单片机的串口驱动器,是利用串口进行项目开发(如连接传感器、无线模块、打印调试信息等)的关键基础。
graph TD
A[单片机串口驱动器] --> B[硬件部分 UART外设]
A --> C[软件部分 驱动函数/库]
B --> B1[波特率发生器]
B --> B2[发送器 TX]
B --> B3[接收器 RX]
B --> B4[控制/状态寄存器]
B --> B5[数据寄存器 TXDR/RXDR]
C --> C1[初始化函数 UART_Init]
C --> C2[发送函数 UART_SendChar/UART_SendString]
C --> C3[接收函数 UART_ReceiveChar]
C --> C4[中断服务程序 ISR]
C --> C5[缓冲区管理]
C --> C6[状态/错误处理]
C1 -->|配置| B1[波特率]
C1 -->|配置| B4[数据位/停止位/校验位]
C2 -->|写数据| B5[TXDR]
C3 -->|读数据| B5[RXDR]
C4 -->|响应中断| B4[状态寄存器]
C4 -->|管理数据| C5[环形缓冲区]这个流程图展示了单片机串口驱动器的核心构成:
- 硬件部分包含5个关键模块,负责物理层的信号处理
- 软件部分提供6类主要功能,管理硬件操作
- 软件通过寄存器配置硬件参数(蓝色箭头)
- 数据在硬件寄存器和软件缓冲区间流动(橙色箭头)
- 中断服务程序(ISR)作为中枢协调中断事件处理
实际工作时数据流向遵循"写入TXDR -> 硬件串行化 -> TX引脚发送"和"RX引脚接收 -> 硬件解析 -> RXDR -> 软件读取"的路径,配合环形缓冲区实现高效可靠的数据传输。
// 示例:使用环形缓冲区的中断驱动串口初始化(伪代码)
#define UART_RX_BUFFER_SIZE 64
typedef struct {
uint8_t buffer[UART_RX_BUFFER_SIZE];
uint8_t head; // 指向下一个写入位置
uint8_t tail; // 指向下一个读取位置
} ring_buffer_t;
ring_buffer_t rx_buffer = {0};
void UART_Init(uint32_t baud_rate) {
// 1. 配置GPIO引脚为UART功能
PIN_MODE(PORTX, TX_PIN, ALT_FUNCTION);
PIN_MODE(PORTX, RX_PIN, ALT_FUNCTION);
// 2. 配置波特率寄存器 (计算并设置BRR值)
UART->BRR = SystemCoreClock / baud_rate;
// 3. 配置数据格式:8位数据, 1位停止位, 无校验
UART->CR1 = UART_CR1_TE | UART_CR1_RE; // 使能发送和接收
UART->CR1 |= UART_CR1_RXNEIE; // 使能接收中断
// 4. 启用UART
UART->CR1 |= UART_CR1_UE;
// 5. 使能UART全局中断
NVIC_EnableIRQ(UART_IRQn);
}
// UART中断服务程序
void UART_IRQHandler(void) {
if (UART->ISR & UART_ISR_RXNE) { // 接收寄存器非空中断
uint8_t data = UART->RDR; // 读取数据清中断标志
uint8_t next_head = (rx_buffer.head + 1) % UART_RX_BUFFER_SIZE;
if (next_head != rx_buffer.tail) { // 缓冲区未满
rx_buffer.buffer[rx_buffer.head] = data;
rx_buffer.head = next_head;
} else {
// 缓冲区溢出处理
}
}
}
// 用户调用的非阻塞接收函数
uint8_t UART_ReceiveChar(uint8_t *data) {
if (rx_buffer.head == rx_buffer.tail) {
return 0; // 缓冲区空
}
*data = rx_buffer.buffer[rx_buffer.tail];
rx_buffer.tail = (rx_buffer.tail + 1) % UART_RX_BUFFER_SIZE;
return 1; // 成功读取
}此代码展示了三个关键实现:
- UART初始化:配置引脚复用、波特率、数据格式并启用接收中断
- 中断服务程序:在接收中断时读取数据存入环形缓冲区
- 非阻塞接收API:用户程序可安全读取缓冲区数据
调试建议:
- 验证波特率计算值(使用示波器测量实际波特率)
- 首次发送固定字符串(如"AT")进行基础测试
- 触发接收溢出中断后记录错误次数
- 在缓冲区操作时暂时关闭中断保证原子性



基于MSP430单片机的多功能直流电机驱动器
基于MSP430单片机的多功能直流电机驱动器(电源技术应用杂志)-该文档为基于MSP430单片机的多功能直流电机
资料下载
![]() 靓仔峰
2021-09-22 13:50:09
靓仔峰
2021-09-22 13:50:09
基于AT89S51单片机的直流无刷电动机驱动器设计
基于AT89S51单片机的直流无刷电动机驱动器设计(创联电源技术参数)-该文档为基于AT89S51单片机的直流无刷电动机
资料下载
![]() 张虎豹
2021-09-16 11:55:16
张虎豹
2021-09-16 11:55:16
使用51单片机应用MAX7219驱动器的C语言程序免费下载
本文档的主要内容详细介绍的是使用51单片机应用MAX7219驱动器的C语言程序免费下载。
资料下载
![]() 84784
2019-07-22 17:37:00
84784
2019-07-22 17:37:00

51单片机串口配置方法
串口,作为单片机程序开发中最常用、最方便,也是应用最广泛的程序调试方法;无论是作为调试工具,打印出调试信息,还是对功能模块进行通信,串口是每个
2023-04-14 14:58:31
PIC单片机驱动LCD段驱动器的设计
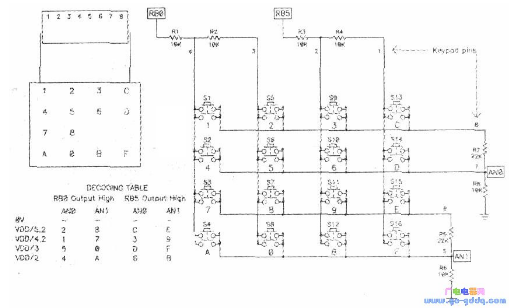
4×4小键盘的典型数字接口使用8个数字I/O引脚。但使用8个引脚作为数字I/O会占用可用于连接LCD的段驱动器引脚的数量。 通过使用2个数字I/O引脚和2个模拟输入引脚,可以向PIC单片机添加一个4×4小键盘,
2019-12-19 15:35:54
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 如何进行编码器的正确接线?接线方法介绍
- 什么是场效应管?它的作用是什么?
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- amoled屏幕和oled区别
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 苹果笔记本macbookpro18款与19款区别
- 通讯隔离作用
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105