

三相步进电机原理及接线简介
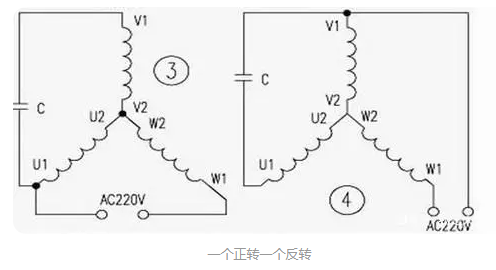
三相步进电机的用法就是加驱动器,脉冲由PLC或数控等来发,步进电机的三根线接驱动器的UVW,驱动器另接220V电源。 驱动器的控制脉冲和方向接PLC或数控。三相的步进电机就是内部三相绕组接成三角形,是三条线的,
更多
好的,我们来简单介绍一下三相步进电机的原理和接线方法。
一、 基本原理
三相步进电机是一种将数字电脉冲信号转换成精确机械转角的电磁执行元件。它的核心原理是磁阻转矩原理:定子产生的磁场会吸引转子磁极(或凸极)到达磁阻最小(即磁路磁导最大)的位置。
-
结构:
- 定子: 通常有6个主磁极(极靴),均匀分布在圆周上。每个磁极上绕有线圈(绕组)。这6个线圈被分成 A、B、C 三相。
- 方式一:相邻的两个磁极线圈组成一相(共3对极)。
- 方式二:相隔120度的三个磁极线圈串联组成一相(也构成3个独立的电磁铁)。
- 转子: 没有励磁绕组。主要有两种类型:
- 反应式转子: 由软磁材料(如硅钢片)叠压而成,带有齿槽(凸极)。转子齿数决定了电机的步距角精度。
- 永磁式转子: 采用永磁体(如钕铁硼)制成多对磁极(比较少见,永磁步进通常使用两相或五相)。
- 定子: 通常有6个主磁极(极靴),均匀分布在圆周上。每个磁极上绕有线圈(绕组)。这6个线圈被分成 A、B、C 三相。
-
工作过程:
- 驱动器按特定顺序(相序)和时序依次向 A、B、C 三相绕组轮流通入脉冲电流(直流电或脉动直流)。
- 每输入一个电脉冲信号,定子就产生一个特定的空间磁场矢量。
- 转子上的齿(凸极)会被定子产生的最强磁场方向吸引,使其对齐磁阻最小的位置。
- 随着电脉冲信号按
A->B->C->A->...或A->C->B->A->...的顺序循环通电,定子产生的磁场方向(或空间矢量)也会按固定的角度(例如120度)步进式地旋转。 - 转子为了跟随磁阻最小的位置,会一步一步地跟随定子磁场的旋转方向转动,每接收到一个脉冲,转子就旋转一个固定的角度(称为步距角)。
- 三相步进电机的标准整步步距角通常为1.2°(300齿转子)或0.9°(400齿转子),也可以通过驱动器的细分技术获得更小的步距角。
核心: 控制器通过给驱动器发送脉冲,驱动器控制三相线圈按顺序导通电流,使定子磁场方向步进旋转,从而利用磁吸力拖动转子同步步进旋转。输入的脉冲个数决定转子的总旋转角度,脉冲的频率决定转子的旋转速度。
二、 接线简介
- 重要前提: 三相步进电机绝对不能直接接入交流电源(如220V)或直流电源!必须使用配套的 三相步进电机驱动器 来连接控制器(如PLC、单片机)和电机。
- 驱动器负责接收控制器的脉冲、方向和使能信号,并将其转换为精确控制三相线圈通断和电流大小的功率信号。
接线步骤(通用步骤,具体请务必参考电机和驱动器说明书):
-
连接驱动器和控制器:
- 将控制器的 PUL+ (或 STEP+) 连接到驱动器的 PUL+ (或 STEP+)。
- 将控制器的 PUL- (或 STEP-) 连接到驱动器的 PUL- (或 STEP-)。(脉冲信号线)
- 将控制器的 DIR+ (或 DIR+) 连接到驱动器的 DIR+ (或 DIR+)。
- 将控制器的 DIR- (或 DIR-) 连接到驱动器的 DIR- (或 DIR-)。(方向信号线)
- 将控制器的 ENA+ (或 ENA+) 连接到驱动器的 ENA+ (或 ENA+)。
- 将控制器的 ENA- (或 ENA-) 连接到驱动器的 ENA- (或 ENA-)。(使能信号线,有时可省略或悬空)
- 控制器和驱动器需要共同的 GND (接地) 参考点。
- 注意: 控制器端一般是TTL/差分信号输出,驱动器端是光耦输入。接线方式(共阳极/共阴极)取决于控制器输出方式和驱动器输入要求(见下一步)。
-
设置驱动器控制信号逻辑:
- 驱动器通常有跳线帽或拨码开关用于设置 PUL/DIR/ENA 信号的输入逻辑:
- 共阳极: 控制器信号端通常置为低电平有效。将 PUL+、DIR+、ENA+ 连接到控制器电源正极(+5V或+24V),将 PUL-、DIR-、ENA- 分别连接到控制器的脉冲、方向、使能输出端口(输出低电平时信号有效)。
- 共阴极: 控制器信号端通常置为高电平有效。将 PUL-、DIR-、ENA- 连接到控制器电源地(GND),将 PUL+、DIR+、ENA+ 分别连接到控制器的脉冲、方向、使能输出端口(输出高电平时信号有效)。
- 非常重要! 务必根据你的控制器输出方式和驱动器手册指示选择正确的接线逻辑方式。
- 驱动器通常有跳线帽或拨码开关用于设置 PUL/DIR/ENA 信号的输入逻辑:
-
设置驱动电流:
- 驱动器通常有跳线帽或拨码开关用于设定输出给电机绕组的 峰值电流值。这个电流值必须匹配或略小于你的电机铭牌上的额定电流值。 设置过大可能损坏电机,设置过小可能导致电机失步、力矩不足或发热异常。
-
设置细分(微步):
- 驱动器通常有跳线帽或拨码开关用于设置 细分倍数(如 1, 2, 4, 8, 16, 32, 64, 128 等)。
- 细分倍数越高,每个整步被分成的微步越多,电机运行越平滑,噪音和振动越小,但对应的控制器需要发送的脉冲数也越多。
- 选择适合您应用需求(精度、速度、平滑性)的细分设置。
-
连接驱动器和电源:
- 将适配的 直流电源(电压范围需符合驱动器输入要求,常见24V, 36V, 48V, 60V等)的 正极(+) 接到驱动器的 V+ 或 PWR+ 端子。
- 将直流电源的 负极(-) 或 地线 接到驱动器的 V- 或 PWR- 或 GND 端子。
- 注意电源极性!反接会烧毁驱动器!
- 确保电源功率(电压x电流)能满足驱动器峰值功率需求。
-
连接驱动器和电机:
- 关键步骤: 找到电机的引出线。三相步进电机通常有 4根 或 6根 引出线。
- 6线制电机: 这是最常见的形式。每相绕组有单独的起点(如 A, B, C)和终点(如 Ā, B̄, C̄)。有时用颜色区分:
- A (红), Ā (红白)
- B (黄), B̄ (黄白)
- C (蓝), C̄ (蓝白) (颜色仅为示例,不同厂家不同,务必以标签或说明书为准!)
- 4线制电机: 三相绕组在电机内部已按 Y型(星型) 接法连接好,引出三个首端(如 A, B, C)和一个公共端(COM)。较少见。
- 6线制电机: 这是最常见的形式。每相绕组有单独的起点(如 A, B, C)和终点(如 Ā, B̄, C̄)。有时用颜色区分:
- 接线方法:
- 对于6线制电机 (最通用):
- 将电机绕组的 A 接到驱动器的 A+ 或 Ua 端子。
- 将电机绕组的 Ā 接到驱动器的 A- 或 Ua' 端子。
- 将电机绕组的 B 接到驱动器的 B+ 或 Vb 端子。
- 将电机绕组的 B̄ 接到驱动器的 B- 或 Vb' 端子。
- 将电机绕组的 C 接到驱动器的 C+ 或 Wc 端子。
- 将电机绕组的 C̄ 接到驱动器的 C- 或 Wc' 端子。
- 务必保证每一相的线圈起点和终点接正确!反接可能导致电机力矩减弱、震动大或不转。
- 相序 (A, B, C) 一般不影响转动,只影响转动方向(可通过控制器DIR信号改变),但最好按驱动器标记顺序连接。
- 对于4线制电机 (星型接法):
- 将电机的 A 接到驱动器的 A+ 或 Ua 端子。
- 将电机的 B 接到驱动器的 B+ 或 Vb 端子。
- 将电机的 C 接到驱动器的 C+ 或 Wc 端子。
- 将电机的 COM (公共端) 接到驱动器的 A-、B-、C- 三个端子短接在一起的公共点(如果驱动器有标记 COM/Star Point)或者直接短接驱动器的 A-、B-、C- 端子(具体做法 严格参考驱动器说明书,不是所有驱动器都原生支持Y接电机)。
- 重要: 这种接法需要驱动器支持 Y 型接法电机或者提供专门的 COM 端子。接线前务必确认驱动器兼容性。如果驱动器没有明确说明支持星型接法,可能需要连接一个额外的星型连接器(将电机 A-, B-, C- 在外部短接)。
- 对于6线制电机 (最通用):
- 关键步骤: 找到电机的引出线。三相步进电机通常有 4根 或 6根 引出线。
示意图 (简化,基于6线制电机和通用驱动器):
┌───────┐ ┌──────────┐
[控制器]------(PUL/DIR/ENA)------->| 驱动器 |<------(DC Power)----[直流电源]
│ | | |
└───────┘ └─────↑────┘
A+ │ A- V+ PWR+
B+ │ B- V- PWR-
C+ │ C-
│
[步进电机]─────────────┴─────────────────┐
(A, Ā) (B, B̄) (C, C̄)
[红色] [黄色] [蓝色]
[红白] [黄白] [蓝白] (示例颜色)重要安全提示:
- 先断电操作: 在接线、拆线或更改设置时,务必先断开电源!
- 确认电压电流: 仔细核对电源电压、驱动器设定电流值是否符合电机和驱动器要求。
- 紧固接线: 确保所有端子连接牢固可靠,防止松脱打火。
- 查阅手册: 不同品牌、型号的电机和驱动器可能有细微差别。在进行任何连接和设置之前,务必仔细阅读并严格遵循电机和驱动器附带的技术手册(Datasheet或User Manual)! 这是最准确、最安全的依据。
- 接地: 确保驱动器、电源和系统机架(如适用)有良好的接地。
反转电机方向: 如果需要改变电机旋转方向,有两种方法:
- 改变驱动器接收的
DIR信号电平(高变低或低变高)。 - 在驱动器输出端交换任意两相(例如交换A和B两相的所有线)的接线(但不推荐频繁改动硬件,优先使用DIR信号控制)。
希望这个简单的介绍能帮助你理解三相步进电机的基本原理和接线要点!祝您快速上手应用成功!
步进电机的驱动与控制 三相步进电机的驱动电路
根据我读的《步进电机应用技术》这本书,进行的学习过程中的知识记录和心得体会的记录。 前言 基本信息 前言说明 三相
资料下载
![]() 陈静
2023-03-20 11:46:35
陈静
2023-03-20 11:46:35
7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 传感器常见类型有哪些?
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号