

如何采用DSP技术实现运动控制器的设计?
对于简单的运动控制系统,采用单片机设计的运动控制器即可满足要求,且性价比较高。
更多
使用DSP(数字信号处理器)技术实现运动控制器设计是一项涉及硬件架构、实时算法和控制理论的系统工程。以下是关键步骤和核心技术的详细说明:
一、核心设计流程
-
需求分析与系统定义
- 明确控制对象(伺服电机/步进电机)、轴数、精度、速度、扭矩要求。
- 确定控制模式:位置/速度/扭矩控制、轨迹插补(直线/圆弧)、同步控制等。
- 设定实时性能指标:控制周期(通常需 < 100us)、通信接口(如 EtherCAT, CANopen)。
-
DSP芯片选型
- 核心计算能力:选择具备高主频、硬件浮点单元(FPU)、专用数学加速器的 DSP(如 TI C2000/C6000, ADI SHARC)。
- 片上外设:关键外设包括:
- 高精度PWM模块:用于驱动功率逆变器(如ePWM在C2000)。
- 高速ADC:电流/电压反馈采样(12+位,采样率 > 1MSPS)。
- QEP/CAP 编码器接口:直接读取光电编码器信号。
- 通讯接口:CAN、SPI、UART、Ethernet MAC(或工业以太网从站控制器)。
- 快速片上存储器:存放实时代码和数据。
-
硬件电路设计
- 功率驱动板:IGBT/MOSFET驱动电路、保护电路(过流、过压)、栅极驱动IC。
- 信号调理电路:
- 电流采样:使用隔离式电流传感器(霍尔效应/罗氏线圈)或低感采样电阻 + 差分放大。
- 编码器信号:差分转单端、滤波整形。
- 隔离设计:使用光耦/数字隔离器隔离PWM、ADC、编码器等信号。
- 时钟/电源管理:低噪声设计,确保ADC采样精度。
-
软件架构设计(实时控制系统)
- 分层设计:
- 应用层:轨迹规划、人机交互、高级逻辑控制。
- 实时内核层:采用 RTOS(如FreeRTOS, TI-RTOS)管理任务调度、中断、通信。
- 驱动层:配置DSP外设(PWM/ADC/编码器)的底层驱动程序。
- 分层设计:
-
核心控制算法实现
- 电流环(最内环)
- 采样同步:在PWM周期中点触发ADC采样(消除开关噪声影响)。
- Clarke/Park变换:将三相电流转换为dq轴分量(用于磁场定向控制FOC)。
- PI控制器:对Id(磁通分量)、Iq(转矩分量)独立控制,实现解耦。
- 反Park/SVPWM:将控制量逆变换回三相PWM占空比。
// 示例(伪代码):电流环中断服务程序 void PWM_ISR() { read_encoder(); // 获取转子位置θ adc_sample_phase_currents(Ia, Ib, Ic); // 同步采样相电流 Clarke_Transform(Ia, Ib, Ic, &Iα, &Iβ); // 转换为αβ坐标系 Park_Transform(Iα, Iβ, θ, &Id, &Iq); // 转换为dq坐标系 Id_error = Id_ref - Id; Iq_error = Iq_ref - Iq; Vd = PI_Id(Id_error); // 执行PI控制(通常用抗积分饱和型) Vq = PI_Iq(Iq_error); Inv_Park_Transform(Vd, Vq, θ, &Vα, &Vβ); // 反变换回αβ坐标系 SVPWM_Generate(Vα, Vβ); // 计算并更新PWM占空比 }
- 速度环(中环)
- 位置差分+M法测速:用编码器脉冲计数估算实际转速。
- 速度PI/PID:输出目标转矩指令→Iq_ref(带宽远低于电流环)。
- 位置环(最外环)
- 插补算法:规划路径(如梯形/S曲线加减速)。
- 位置PID + 前馈控制:结合比例、积分、微分及加速度前馈提升响应。
- 电流环(最内环)
-
高阶优化技术
- 观测器设计:
- 滑模观测器(SMO) / 龙贝格观测器:无传感器电角度估算。
- 负载观测器:实时估计扰动扭矩进行补偿。
- 自适应控制:在线调整PID参数(如自整定算法)。
- 陷波滤波器:抑制机械共振频率(如使用IIR/FIR滤波器)。
- 观测器设计:
-
通信与上位机接口
- 实现工业总线协议栈:
- CANopen (DS402):标准化运动控制指令。
- EtherCAT:分布式时钟同步,用于多轴同步控制。
- Modbus TCP/RTU:兼容HMI/PLC通信。
- 实现工业总线协议栈:
-
安全与诊断机制
- 硬实时监控:
- PWM保护区(Trip Zone):硬件级关断PWM。
- 双路电流采样冗余校验。
- 看门狗定时器防死锁。
- 硬实时监控:
二、DSP在运动控制中的核心优势
- 并行处理能力:
- 单指令多数据(SIMD)加速矩阵计算(如FOC变换)。
- 专用PWM协处理器(如TI C2000的HRPWM模块)。
// TI C2000 HRPWM配置(C代码片段) EPwm1Regs.TBCTL.bit.HSPCLKDIV = 0; // 高频时钟不分频 EPwm1Regs.HRPWME.bit.HRLE = 1; // 高分辨率使能 EPwm1Regs.CMPA.bit.CMPAHR = (Uint16)(0.75 * 32768); // 50%占空比的高分辨率微调
- 极低延迟中断响应:
- 中断服务程序可在 < 10个时钟周期 内响应(电流环速度关键)。
- 硬件数学加速:
- 部分DSP内置三角函数加速器(TPU),加速Park变换中的sin/cos计算。
- 低噪声混合信号集成:
- 高精度ADC与PWM输出硬件同步,避免软件延时抖动。
三、典型开发工具链
| 工具类别 | 代表产品 | 用途 |
|---|---|---|
| 硬件平台 | TI C2000 LaunchPad / ADI ADSP-SC58x | 快速原型开发 |
| 开发环境 | TI Code Composer Studio (CCS) | 支持DSP优化的C/C++编译 |
| 数学工具 | MATLAB Simulink Coder | 模型生成嵌入式代码(FOC/IPC) |
| 调试工具 | XDS100v3仿真器 + CScope | 实时跟踪PWM波形/变量观测 |
| 通信分析仪 | CANalyzer / Wireshark | 总线协议解码与性能测试 |
四、设计实践建议
- 从单轴控制开始:验证电流环稳定性后再扩展多轴联动。
- 使用增量式编码器:Z相信号用于初始位置校正(通电寻零)。
- 重点调试电流环:通过频率响应测试(波特图)优化PI参数。
- 隔离高噪电路:ADC采样电路与IGBT驱动板严格分开布局。
- 使用数字隔离芯片:如ADI ADuM系列隔离SPI/CAN总线信号。
- 抗饱和处理:为所有PID加入抗积分饱和(Anti-Windup)逻辑。
// 抗积分饱和PI示例(C语言) float PI_Controller(float error, float Kp, float Ki, float min_out, float max_out) { static float integral = 0; float output; integral += Ki * error * Ts; // Ts为控制周期 // 积分限幅 if (integral > max_out) integral = max_out; if (integral < min_out) integral = min_out; output = Kp * error + integral; // 输出限幅 if (output > max_out) output = max_out; if (output < min_out) output = min_out; return output; }
五、性能极限挑战
- 更短控制周期:< 5us控制周期需硬件增强(如FPGA辅助运算)。
- 高频PWM精度:当开关频率 > 100kHz时,需HRPWM技术提升分辨率。
- 超多轴协同:≥16轴同步需采用SoC(如TI AM243x带PRU-ICSS工业核心)或FPGA方案。
总结流程
需求 → 选型 → 硬件设计 → 分层软件 → 三环控制(FOC为核心)→ 通信/安全 → 工具链支持 → 优化迭代
实际应用中,TI的C2000系列被广泛用于低成本伺服,而ADI SHARC在高端机器人中发挥性能优势。成功的关键在于结合DSP的高效实时处理能力和对电机控制理论的深度应用。
如何采用ARM+DSP实现嵌入式四轴运动控制器的设计?
为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,给出一种基于ARM微处理器S3C2440和专用DSP运动
2021-04-20 06:23:57
基于DSP和CPLD实现开放式运动控制器的设计
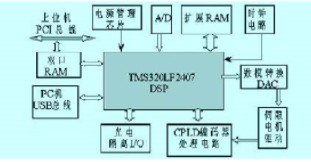
本文开发的开放式运动控制器以PC机为平台,完成坐标变换、轨迹规划、粗插补运算等控制指令的设置和发送,同时可以实时显示当前伺服系统的
2020-09-23 08:44:00
如何使用DSP和CPLD进行运动控制器的设计与应用资料说明
针对伺服系统控制的特点和要求,介绍了一种基于DSP和CPLD的开放式多轴伺服运动控制器
资料下载
佚名
2019-05-29 17:09:27
7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- BLDC电机技术分析
- 复位电路的原理及作用
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 传感器常见类型有哪些?
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号