

伺服电机怎样调试
1.初始化参数.2.接线.3.试方向4.抑制零漂5.建立闭环控制6.调整闭环参数
更多
好的,伺服电机的调试是一个系统化的过程,需要结合硬件连接、软件配置和现场调整。以下是调试伺服电机的一般步骤和关键点,适用于大多数主流品牌(如松下、三菱、安川、台达、西门子、汇川等),但请务必参考你所用伺服驱动器和电机的具体手册:
调试前准备
-
安全第一:
- 切断系统电源(总开关)。
- 遵守电气安全规范(如佩戴绝缘手套、使用验电笔)。
- 确保工作区域整洁,防止短路或触电。
- 确认紧急停止回路功能正常。
- 关键: 在连接或断开任何电缆之前,务必断电!特别是伺服驱动器的主电源和控制电源。
-
硬件连接确认:
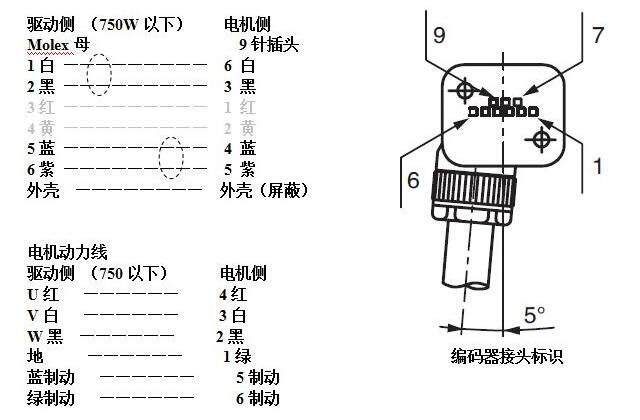
- 主回路: 正确连接驱动器的主电源输入(单相/三相)。正确连接驱动器到电机的动力线(U, V, W)。务必确认相序正确(非常重要!接错可能导致电机飞车或损坏)。连接地线。
- 编码器回路: 使用专用编码器电缆(通常屏蔽双绞线),可靠、无干扰地连接到驱动器。注意接口定义,不同品牌插头可能不同。
- 控制信号回路:
- 连接控制电源(通常是DC24V)。注意正负极。
- 连接使能信号(SON/Servo ON)、报警清除(ALRS)、硬限位(POT/NOT)或其他安全信号。
- 根据控制方式连接:
- 位置模式: 脉冲/方向信号(或正交脉冲)或通讯接口(如EtherCAT, CANopen, Modbus)。注意信号类型(差分/集电极开路)、电压等级(5V/12V/24V)和公共端。
- 速度模式: 模拟量速度指令(如±10V)或通讯给定。
- 转矩模式: 模拟量转矩指令(如±10V)或通讯给定。
- 连接输出信号:准备好(RDY/SRDY)、伺服报警(ALM)、速度到达(SA/ST)、零速检测(TZ)等。
- 制动器(如果有): 正确连接电机的内置抱闸(通常驱动器有专门的抱闸控制输出口,需接继电器驱动)。
- 检查: 仔细检查所有接线端子是否紧固,线头有无裸露,电缆有无破损。
-
机械系统检查:
- 电机和负载的机械连接(如联轴器、皮带、丝杆)是否可靠且对中良好?严重不对中是振动和损坏的根源!
- 负载安装是否牢固?运动机构是否顺畅?有无卡死或过大摩擦?(可以尝试手动盘动负载)
- 行程限位开关(软限位、硬限位)安装到位且功能有效吗?
- 系统是否有惯性飞轮、偏心负载等特殊机械特性?
-
软件工具准备:
- 安装好伺服驱动器配套的调试软件(如松下 Panaterm、三菱 MR Configurator、安川 SigmaWin+、台达 ASDA-Soft、西门子 STARTER/SIZER, 汇川 IS620/680 Configurator等)或准备好通过操作面板设置参数。
- 准备好电脑或手持式编程器,以及所需的通讯线缆(USB, RS232, RS485, Ethernet等)。
调试步骤
-
上电初始化:
- 先只上控制电源(DC24V),主电源(动力电)断开。
- 观察驱动器状态指示灯(通常有Power, Run/Ready, Alarm等),确认驱动器控制电路工作正常,无报警。
- 连接调试软件或操作面板,尝试建立通讯。
-
基础参数设置:
- 驱动器型号/电机型号选择: 在软件中正确选择与之匹配的驱动器型号和电机型号(或电机代码/序列号)。这是驱动器为电机提供正确电流和控制的基础。
- 控制模式选择: 设置驱动器将要工作的主模式(位置/速度/转矩/全闭环等)。
- 指令输入方式设定:
- 位置模式:脉冲类型(脉冲+方向、正交AB、双脉冲)、电子齿轮比(分子/分母)。
- 速度/转矩模式:指令来源(模拟量输入设定值范围及偏置、通讯给定换算)。
- I/O功能定义: 设置输入输出端口的功能(如哪个输入做使能、正限位、负限位等;哪个输出做准备好、报警等)。
- 设置电子齿轮比(位置模式):
- 根据机械结构(如丝杆导程、减速比)和编码器分辨率,设置合适的电子齿轮比,使得控制器发出的指令脉冲数对应到期望的实际负载移动距离(或角度)。
- 公式简化:
指令脉冲数 / 负载移动距离 = 电子齿轮比 * 编码器分辨率 / 机械传动比。目标是让这个比值易于计算(分子分母尽量小)。
-
首次点动与转向确认:
- 极重要: 将系统调至低速度、低力矩状态(如设置速度限制值很低,或短按点动键)。
- 使用软件的点动功能(JOG)或在安全保证下给少量脉冲。
- 观察:
- 电机是否轻微转动?
- 转动方向是否与点动指令方向一致?与预期方向一致?
- 方向不一致处理:
- 修改点动方向设定(软件中有方向取反选项)。
- 如果无效,可能需要交换电机的UVW动力线中的任意两根线(再次强调,务必断电操作!)。
- 编码器反馈方向也可能影响,部分驱动器有参数可调编码器计数方向。
- 禁止操作: 绝对禁止在大负载、高速、强刚性或方向未知的情况下突然上电或大力矩点动! 可能导致飞车或机械损坏!
-
零点设置/原点回归:
- 对于需要绝对位置控制的系统(如CNC、机器人),通常需要执行一次原点回归操作。
- 方法:
- 硬件原点(Home)开关法:驱动器支持归零模式,利用原点开关和编码器Z信号(零位标记)精确定位。
- 绝对值编码器:第一次使用需要设置一次零点偏移,之后断电也能记忆位置(需备用电池)。
- 设定当前位置为原点:通过软件操作设定当前位置为零点。
- 设置参考点(机械零点)。
-
增益调整(核心性能优化):
- 这是调试的关键和难点,直接影响系统响应速度、稳定性(是否振动)和精度。大多数驱动器提供自动整定功能,应优先尝试。
- 自动整定:
- 启动自动整定(Auto-tuning/Adaptive tuning)功能。
- 驱动器会让电机按照特定模式(如阶跃响应、正弦扫频)运动(有时会带动负载,有时只让电机本身运动)。
- 通过分析反馈(编码器位置/速度),计算并设置合适的位置环增益(Position Loop Gain - Kpp)、速度环增益(Velocity Loop Gain - Kvp, Kvi),有时还有前馈(Feedforward)增益等。
- 重要: 自动整定时需确保机械连接可靠,否则整定效果差或导致剧烈振动!
- 手动调整:
- 如果自动整定效果不理想(如仍有轻微振动、响应慢),或机械特性特殊(超大惯量、低刚性连接、长传动链),需要手动细调:
- 位置环增益 (Kpp):
作用:直接影响跟随精度和响应速度。越大,系统越快跟踪指令,但过大会导致超调、振荡。调整:从小往大调,直到系统响应指令足够快但不振荡。
- 速度环比例增益 (Kvp):
作用:抵抗扰动(如负载变化),影响速度指令响应速度。调整:增大会提高刚性,加快响应,过大易引起速度波动(嗡鸣声)或振动。
- 速度环积分增益 (Kvi):
作用:消除稳态速度误差(如克服摩擦)。调整:帮助消除微小抖动或低速爬行,过大同样会引起振荡和超调。
- 滤波器: 如果高频振动明显(吱吱声),可能需要增加速度或位置指令滤波器带宽,但会牺牲一些响应速度。
- 前馈 (Feedforward):
作用:提前预测系统需要的力矩/速度,减少跟随误差(尤其拐角)。调整:速度前馈(Kvff)、加速度前馈(Kaff)。按驱动器手册推荐值开始试调。
原则:先调速度环(Kvp, Kvi),保证速度控制稳定;再调位置环(Kpp);最后考虑前馈。小幅调整,每次改一个参数,观察效果(最好能看示波器图形)。避免盲目追求过高增益。
-
功能与保护设置:
- 设置速度限制: 在位置模式下限制电机最大速度,在速度/转矩模式下设置指令速度上限。
- 设置转矩限制: 限制电机最大输出转矩(如正转矩极限、负转矩极限/制动转矩极限),保护电机和机械。
- 设置位置误差过大范围: 当实际位置与指令位置偏差超过此值,驱动器报警停机。
- 设置过载保护: 设定允许的持续电流和峰值电流保护阈值。
- 配置输入滤波/抗干扰: 对外部信号进行滤波,防止干扰误触发。
- 保存参数: 所有设置完成后,务必将当前参数保存到驱动器的非易失存储器(EEPROM/Flash)中,防止断电丢失。软件里通常有“Save to ROM”或类似按钮。
-
运行测试与优化:
- 在软件中创建或模拟预期的运动轨迹(如梯形速度曲线、S曲线)。
- 在安全、低速情况下开始测试实际运行。
- 观察与记录:
- 实际运动是否按指令执行(位置、速度、加速度)?
- 电机是否有异常噪音(尤其是高频啸叫)?
- 机械系统是否有明显振动?
- 驱动器面板或软件上是否有报警?
- 关注位置误差、速度跟随误差是否在可接受范围内(软件通常可显示)。
- 针对性优化:
- 启动/停止有抖动?调整加减速时间常数或S曲线平滑度,检查增益(特别是积分)。
- 跟随误差(尤其拐角处)大?尝试增加前馈增益(速度/加速度前馈)。
- 高速时振动?可能增益过高或机械共振,需降低增益或增加陷波滤波器(如果驱动器支持)。
- 低速爬行或跳动?检查摩擦补偿参数(如有),或适当增加速度环积分增益。
- 逐步提高速度和负载,重复测试和微调参数。
-
最终验证与文档:
- 在所有预期工作条件下进行测试(高速、低速、重载、轻载、频繁启停)。
- 验证急停功能、硬/软限位功能有效。
- 做好记录: 保存最终的、经过验证的参数文件(.prm, .sdo等)。记录下所有关键设置和调试要点。这对以后维护或问题排查至关重要。
重要安全与操作提示
- 时刻警惕旋转部件! 调试过程中手、工具、衣物远离电机轴和联轴器。
- 严禁带电操作! 插拔任何信号线(特别是编码器线),或改动动力线前,必须完全切断主电源和控制电源。
- 先低后高: 点动和测试时,务必从最低速度和力矩限制开始,逐步提升。
- 方向确认是第一步! 正确方向确认前禁止大动作。
- 善用软件工具: 示波器、信号监控、报警诊断等功能是强大的助手。
- 不要忽视机械问题: 调试不顺时,往往要回头检查机械安装(对中、摩擦、刚性)。
- 参考手册!参考手册!参考手册! 任何不确认的地方,优先查阅特定型号伺服系统的官方手册。不同品牌、型号的参数命名、功能细节差别很大。
这个过程需要耐心和实践经验。遇到困难时,先确保安全,再回看基础(接线、模式设置),然后逐步分析排查。祝你调试顺利!
高热or极寒,派克高低温伺服电机就该出场了
通用伺服电机性能良好,反应速度快,控制度高,位置精度准确,在自动化控制领域应用广泛,但遇到高热温度or极寒气候,就不能使用通用伺服
资料下载
![]() 苏州璟丰机电JF
2022-01-10 13:37:54
苏州璟丰机电JF
2022-01-10 13:37:54
伺服电机该如何设置参数,详细步骤是怎样的
伺服电机刚买来时,为了适应工作对象,还有自己的熟练程度,是需要进行设置和调试都能继续使用的,那么不懂这方面应该怎么设置呢?下面华科星小编来分享具
2021-07-11 15:20:47
运动控制器控制伺服电机采用的指令和伺服电机调试的6个步骤说明
这种方式与步进电机的控制方式类似,运动控制器给伺服驱动器发送“脉冲/方向”或“CW/CCW”类型的脉冲指令信号;伺服驱动器工作在位置控制模式,位
2019-02-17 11:16:27
7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 传感器常见类型有哪些?
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号