

AGV的工作原理及应用分析
AGV是无人搬运车(Automated Guided Vehicle) 的英文缩写。是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人( WMR一一Wheeled Mobile Robot)的范畴。
好的,AGV(自动导引运输车,Automated Guided Vehicle)是现代物流自动化和智能工厂的核心设备之一。下面为您详细分析其工作原理及应用:
一、 AGV 的工作原理
AGV的工作原理可以形象地理解为“感知 - 决策 - 执行”的闭环控制系统,使其能够在无人干预的情况下,自主完成从起点到终点的物料搬运任务。其核心构成要素和工作流程如下:
-
感知/定位(Perception / Localization) - “我在哪里?”
- 核心任务: 实时确定自身在地图或作业环境中的精确位置和方向。
- 导航技术(关键): 根据不同的技术实现:
- 磁导航: 沿预先埋设在地面的磁条、磁带或磁钉轨道行驶。通过车底的磁传感器(如霍尔传感器)感知磁场信号确定路径和位置。
- 二维码导航: 地面铺设网格状的二维码标签。AGV通过底部摄像头扫描识别二维码,结合内部地图信息实现精确定位。
- 激光SLAM导航:
- 激光雷达: AGV搭载激光雷达,发射激光束并接收反射信号,测量周围环境特征(如墙壁、柱子、设备轮廓)的距离信息。
- SLAM算法: 同时定位与地图构建算法。AGV在行驶中,根据实时激光扫描数据不断与其内置的环境地图进行匹配(定位),并动态更新和完善地图(建图),实现厘米级定位。这是目前最主流的先进导航方式,无需对环境进行大规模改造。
- 视觉SLAM导航: 原理类似激光SLAM,但使用摄像头捕捉环境图像和特征点信息(如纹理、边缘),通过计算机视觉算法实现定位与建图。
- 惯性导航: 利用陀螺仪和加速度计测量车辆的角速度和线加速度,通过积分计算位置变化(航位推算)。通常作为其他导航方式的辅助,以补偿短时信号丢失或提高精度。
- 混合导航: 结合多种导航技术(如激光SLAM+惯性+磁钉/二维码),在关键节点进行高精度矫正,提高整体系统的鲁棒性和可靠性。
- 路径预设: 通过调度系统或内置地图,规划好A点到B点的行驶路线。
-
路径规划与决策(Planning / Decision Making) - “我该往哪走?”
- 核心任务: 根据任务指令(起点、终点、任务优先级等)和实时感知的环境信息(包括其他AGV、障碍物位置),规划出最优(时间短、距离短、能耗低)且安全的行驶路线。
- 全局路径规划: 基于整个环境地图(包含所有可行路径和静态障碍物),规划出从起点到终点的大致路线。
- 局部路径规划: 在行驶过程中,实时处理遇到的动态障碍物(如行人、其他车辆、临时堆放物),动态调整行驶路径,绕开障碍物或安全避让。
- 交通管理(由调度系统完成): 在有多台AGV协同工作的场景下,中央调度系统负责协调各AGV的行驶路线、优先权、任务分配,避免拥堵和碰撞(类似于交通灯系统)。
- 任务调度(由调度系统完成): 接收上位系统(如WMS/MES)下发的搬运任务,并根据AGV状态(位置、电量、任务负载)、任务优先级等因素,将任务分配给最合适的AGV。
-
执行/驱动(Execution / Driving) - “我如何移动?”
- 核心任务: 根据决策系统计算的路径和控制指令,精确地驱动车辆移动。
- 驱动单元: AGV底部装有驱动轮(提供动力)和转向系统(改变方向)。常见驱动方式:
- 差速驱动: 通常有两个独立的驱动轮(左右各一)和一个或多个随动轮。通过控制左右驱动轮的不同速度或方向实现前进、后退、转弯(原地旋转、弧线转弯)。
- 舵轮驱动: 将驱动轮和转向机构集成在一起(称为舵轮),通过控制舵轮的转向角和速度实现更灵活的运动。通常有单舵轮、双舵轮、四舵轮等配置。
- 运动控制器: 接收决策系统的指令(目标速度、目标方向、目标位置),精确控制驱动电机的速度和舵轮的转向角度,使AGV沿预定路径平稳、准确地运动。
- 安全执行: 在传感器检测到障碍物或危险时,能紧急刹车停稳。
-
安全防护(Safety)
- 核心任务: 确保AGV在运行中不会与人员、设备或其他AGV发生碰撞,保障作业安全。
- 多重传感器融合:
- 激光雷达/激光扫描仪: 提供360°或大范围内的障碍物检测。
- 超声波传感器: 对透明或反光物体检测效果较好,常用于近距离辅助探测。
- 碰撞传感器(保险杠): 物理接触式感应,作为最后一道防线,当接触到物体时触发紧急停止。
- 防护等级(如SICK / PL d): 符合国际安全标准(如SIL, PL),在检测到障碍物时能根据距离减速、停车或绕行。
- 急停按钮: 供人员在紧急情况下手动触发急停。
- 声光报警: 运行、转弯、警告或急停时发出声音和灯光提示。
-
通信(Communication)
- 核心任务: AGV与中央调度系统、其他AGV、任务系统之间进行可靠信息交互。
- 通信方式: 常见Wi-Fi(普遍)、4G/5G(广域)、工业以太网(高速稳定)等。
- 交互内容:
- AGV:上报自身位置、状态(电量、任务完成情况、报警信息)、感知到的障碍物信息等。
- 调度系统:下发任务指令、路线规划、交通管制命令。
- WMS/MES:下达搬运任务指令(如取货点、放货点)、确认任务状态。
-
动力(Power)
- 核心任务: 为AGV提供持续、可靠的能量来源。
- 主要电源: 铅酸电池(经济)、锂电池(轻量、长寿命、支持快充、主流)。部分特殊场合使用超级电容。
- 充电方式:
- 自动充电: AGV根据调度(低电量时)或空闲时,自动行驶到充电桩进行接触式或无线充电。
- 手动充电: 人工更换电池或插电充电。
-
任务执行机构(Load Handling)
- 核心任务: 在起点安全地拾取物料/载具,在终点安全地卸放。
- 常见机构: 可根据搬运对象定制:
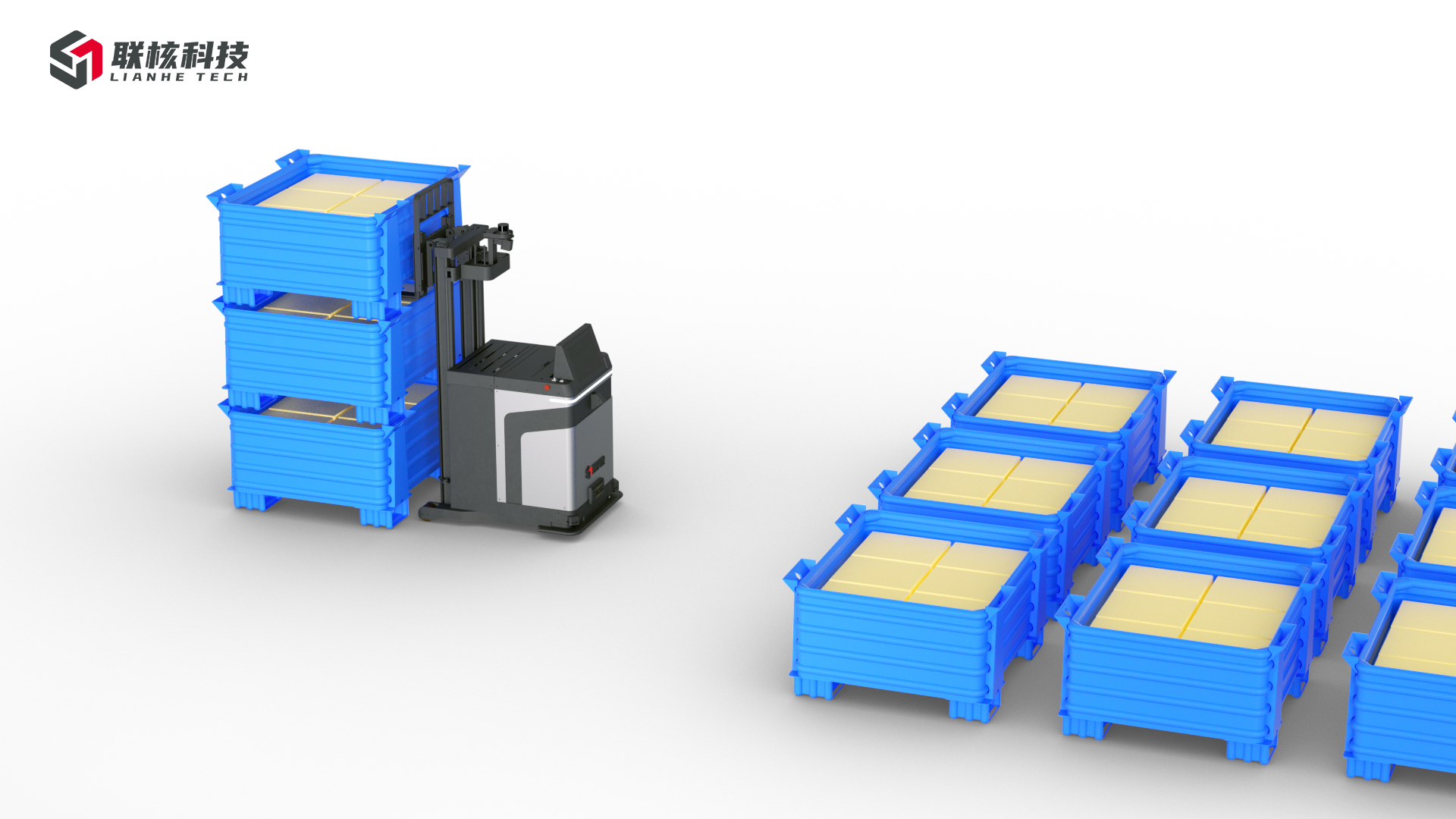
- 顶升式: 升降平台或叉腿,用于举升物料、货架、托盘底部或滚筒线对接。
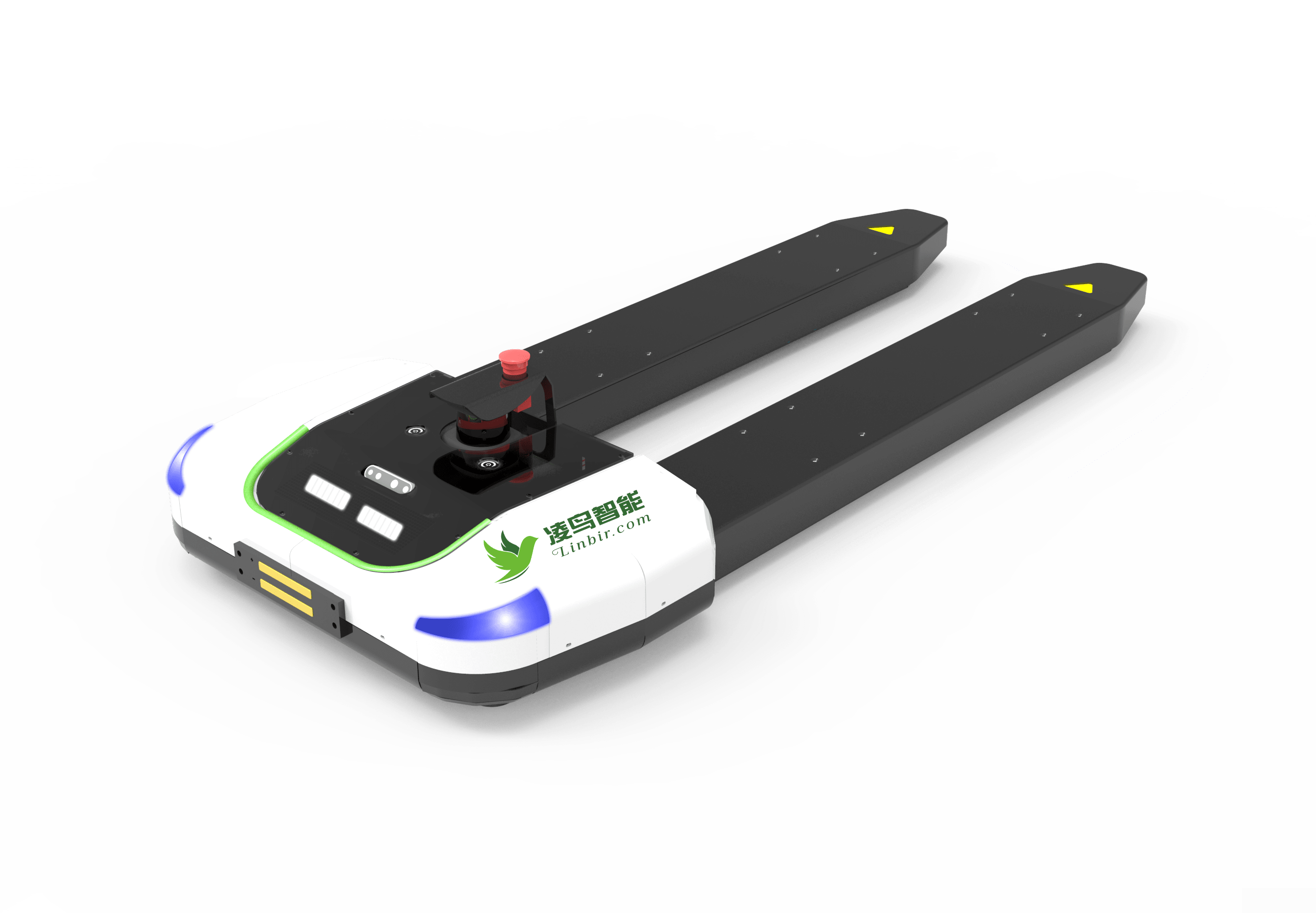
- 叉臂式: 类似小型叉车,直接叉取托盘。
- 潜入式/背负式: 钻入物料架或特制料车底部,将其抬起运走。
- 牵引式: 挂接料车或拖车。
- 滚筒/皮带式: 与外部输送线对接,实现物料自动进出。
- 机械臂/夹爪: 执行更复杂的抓取操作。
- 检测传感器: 检测物料是否在位、举升到位等,确保操作安全可靠。
二、 AGV的应用分析
AGV的应用范围极其广泛,主要在以下领域发挥重要作用:
-
制造业(Manufacturing):
- 物料流转: 车间内部原材料、半成品、成品在各工序间的自动转运。取代传统叉车和人工搬运。
- 生产线对接: 在柔性生产线上,将物料精准运送到不同工位或机台。
- 装配线供料: 准时化(JIT)向装配线配送零部件。可背负料车或与供料架协同工作。
- 仓库协同: 厂内仓库与生产线间的进出库物料运输。
- 特殊场景: 在喷涂、高低温、洁净室等不适合人员进入的环境下执行搬运任务。
- 应用价值: 提升物流效率、实现准时化生产、优化空间利用、减少人力成本、保障产品质量、提高生产柔性、改善人工作业环境。
-
物流仓储(Warehousing & Logistics):
- 自动出入库: AGV将货物从存储区运送到拣选工作站或包装区,或将处理完的货物运回存储区。
- “货到人”拣选: AGV将移动货架背负或牵引到拣选人员面前。拣选员只需在拣选台操作,无需走动,大幅提升拣选效率。
- 包裹分拣中心: 配合分拣设备,在分拣格口间转运包裹。
- 码头/机场: 集装箱、大型货物拖运。
- 冷库作业: 适应低温环境,替代人员进入冷库长时间作业。
- 应用价值: 缩短订单处理时间、提升仓储效率与准确率、优化仓库空间、实现仓库作业24小时运行、减少人为错误、降低体力劳动强度。
-
电商与零售(E-commerce & Retail):
- 大型电商仓中心: 海量订单的“货到人”拣选是其核心应用场景。高效率是其核心竞争力。
- 门店配送中心: 自动化处理门店补货订单。
- 应用价值: 高效应对海量SKU和波次订单、极致的拣选速度以缩短交付时间、高准确率降低退货率、支撑业务快速增长。
-
其他领域:
- 医疗: 医院内部药品/耗材/洁净物品自动配送、病历运送、自动消毒。
- 服务业: 酒店送物、餐厅传菜(逐步应用)、图书馆自动还书。
- 户外应用: 港口码头(AMR)运输集装箱、大型园区、农场物料转运(技术难度较高)。
三、 AGV的优势与局限性分析
-
优势:
- 高效: 7x24小时不间断工作,提高物流周转速度。
- 精确: 定位精准,操作可靠,减少货损和错误。
- 柔性: 路线、任务可灵活调整和调度,适应动态变化的生产和物流需求。混合导航方式适应性更强。
- 安全: 配备多重安全防护,减少人工搬运的事故风险。
- 省人降本: 减少对人力的依赖,降低长期运营成本(尤其人力成本高的区域)。
- 精益: 推动实现准时化、精益生产/物流。
- 环境改善: 替代人员在危险、恶劣、单调重复环境中工作。
- 数据化: 运行数据实时可追溯,助力优化流程。
- 5G+云化趋势: 更高效协同调度、边缘计算助力实时处理。
-
局限/挑战:
- 初始投资成本高: 相比传统设备,前期硬件、软件、集成成本较高。
- 环境要求: 复杂、混乱、变化过快的环境对导航和避障能力要求极高。需要相对规整的地面。
- 复杂场景适应性: 对于需要高度灵活性、创造性判断或复杂人机协作的任务,不如人力灵活。
- 维护成本: 需要专业的维护团队和技术支持。
- 技术门槛: 选型、实施、集成、运维对人员技术要求较高。
- 续航限制: 电池续航能力和充电时间限制了某些高负荷连续运行场景。
- 标准与互操作性: 不同品牌、型号AGV间的协作和通信标准仍在发展中。
总结
AGV是现代工业自动化和物流智能化不可或缺的关键设备。其核心在于通过先进的感知、决策和执行技术,在复杂的动态环境中实现自主、安全的物料搬运。从制造业的生产线流转到电商物流的“货到人”拣选,AGV的应用场景正在深度拓展。虽然存在初始投资高、复杂环境适应挑战等局限性,但随着激光SLAM等导航技术的成熟、成本的下降以及5G/云/人工智能的赋能,AGV/AMR在未来智慧工厂和智能物流体系中扮演的角色将越来越重要,持续为企业带来效率、成本、安全和柔性的全面提升。企业在部署时需综合考虑自身需求、应用场景、ROI以及技术成熟度。
AGV小车的工作原理是什么?
AGV小车通过导航定位、路径规划、任务接收与执行、运动控制、安全监测、状态监测和电池管理等系统协同工作,以实现高效、准确的物流搬运。 1. 导航与定位 AG
2024-12-19 17:53:07
agv无人搬运车工作原理
AGV智能搬运机器人是数字化车间的核心,实现智能转运,提高生产效率,降低人工成本。其车载计算机和通信系统保证了AGV的高效、安全运作,为智慧工厂建设提供了重要支持。
2024-07-26 09:34:08
AGV的原理与操作的学习培训课件
本文档的主要内容详细介绍的是AGV的原理与操作的学习培训课件包括了:AGV概述,新松AGV产品简介,
资料下载
![]() feixia2010
2020-12-21 08:00:00
feixia2010
2020-12-21 08:00:00

基于视觉引导方式的AGV小车其基本工作原理是什么
基于视觉引导方式的 AGV 小车分为自由路径方式与固定路径方式,其基本工作原理为:通过视觉处理技术在 AGV 的行驶路径上识别车辆周围环境图像或
植物根系图像分析仪的工作原理

1970-01-01 08:00:00 至 1970-01-01 08:00:00
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- BLDC电机技术分析
- 复位电路的原理及作用
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 传感器常见类型有哪些?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号