

基于stm32的液位控制系统
基于stm32的液位控制系统
好的,基于STM32的液位控制系统是一个常见的嵌入式应用项目。下面我将详细介绍这样一个系统的核心要素、工作原理和实现步骤:
一、系统目标
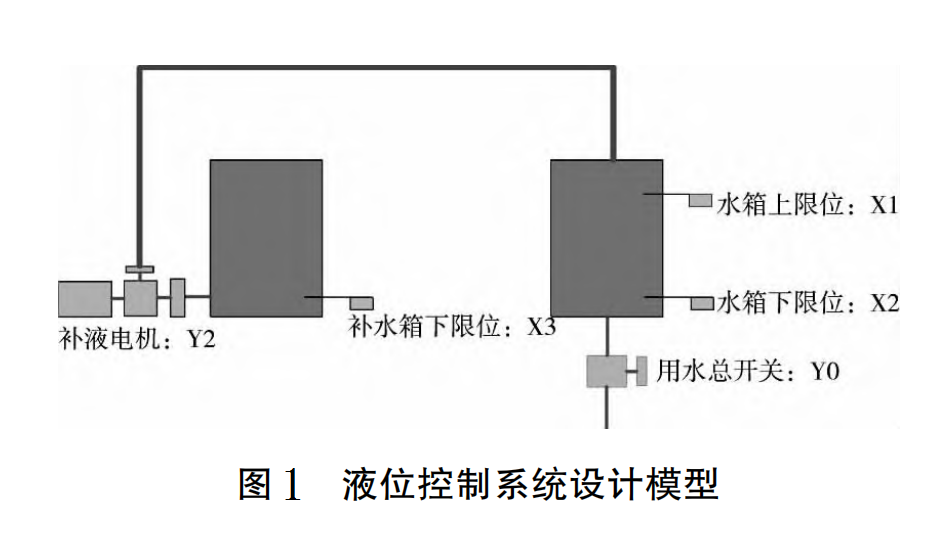
设计并实现一个能够自动监测容器内液体高度(液位)并根据预设的目标高度(设定点)自动控制液体流入或流出,使实际液位稳定在设定点附近的系统。
二、核心组成部分
-
主控制器:
- 核心器件: STM32 系列微控制器 (如 STM32F103C8T6, STM32F407VET6 等,根据需求复杂度选择)。
- 作用: 系统的“大脑”。负责采集传感器数据(液位),运行控制算法(如PID、阈值控制),计算控制量,驱动执行机构动作,处理人机交互(按键、显示),与其他设备通信等。
-
液位传感器: (关键输入)
- 作用: 将液体的物理高度转换成控制器可测量的电信号(模拟电压/电流、数字脉冲、数字信号等)。
- 常用类型:
- 超声波传感器 (HC-SR04 等): 非接触式,测量液面到传感器顶部的距离。计算液位需要知道容器总深度。优点: 安装方便,不接触液体。缺点: 可能受泡沫、蒸汽、环境反射干扰,精度相对受环境影响。
- 压力传感器/液位变送器: 安装在容器底部或侧壁。测量液体静压,其值与液位高度成正比 (P = ρgh)。输出模拟信号 (4-20mA, 0-5V, 0-10V) 或数字信号 (RS485 Modbus 等)。优点: 精度高,稳定性好(尤其工业级)。缺点: 需要接触液体,成本通常高于超声波,需要校准。
- 浮球开关: 离散式开关,只有高/低两种状态。成本最低,常用于极限液位报警保护。
- 电容式/光电式传感器: 也可用于特定场合的点位检测或连续测量。
- 选择依据: 测量精度要求、液体特性(是否腐蚀、易产生泡沫)、成本预算、安装条件。
-
执行机构: (关键输出)
- 作用: 根据控制器的指令,调节液体流入或流出的流量。
- 常用类型:
- 电磁阀: 控制液体管路的通断。常用于控制流入(进水)。控制器通过继电器或晶体管驱动MOSFET来控制其开/关。适用于开关控制或占空比控制。
- 水泵: 用于主动抽吸或加压输送液体。控制水泵的启停(开关控制)或通过电机驱动器控制水泵转速(比例控制)。常用于控制流出(排水)或需要加压输入的场合。
- 调节阀 (需配套执行器): 工业上更精确的比例或积分控制,如电动调节阀、气动调节阀(需转换器)。成本较高,适用于高精度要求。
- 选择依据: 控制精度要求(开关/比例)、流量大小、液体特性、管路压力、成本。
-
驱动电路:
- 作用: STM32的I/O引脚驱动能力有限(通常只能提供几mA电流),无法直接驱动电磁阀、水泵等功率较大的负载。驱动电路提供所需的功率放大和电气隔离。
- 常用方案:
- 继电器模块: 适合开关控制。STM32 GPIO控制继电器线圈,继电器触点控制负载电源通断。优点: 简单可靠,隔离好。缺点: 机械寿命有限,切换速度慢,有触点火花。
- 晶体管 (MOSFET) 驱动电路: 适合开关控制或PWM控制(如控制水泵转速)。STM32 GPIO/PWM信号通过三极管或专用MOSFET驱动器驱动MOSFET开关。优点: 无触点,寿命长,速度快(PWM)。缺点: 需要设计保护电路(续流二极管吸收感应电动势),隔离性不如继电器(可通过光耦隔离输入信号加强)。
- 固态继电器: 结合了晶体管速度和继电器隔离的优点。STM32 GPIO驱动SSR的输入LED端(通常需要串联限流电阻),SSR内部实现光耦隔离和功率开关输出。优点: 无触点、隔离好、寿命长、速度较快。缺点: 成本稍高,有通态压降导致发热。
-
人机交互界面:
- 作用: 设置目标液位(设定点)、显示当前液位、系统状态、报警信息等。
- 常用组件:
- LCD显示屏: (如字符型1602, 12864点阵图形屏, TFT彩屏) 直观显示信息。
- OLED显示屏: 自发光,对比度高,体积小。
- 按键/旋钮编码器: 用于参数设置、模式切换。
- LED指示灯: 指示运行状态、报警状态。
- 接口: 通常使用 GPIO、I2C、SPI 与 STM32 连接。
-
通信接口 (可选):
- 作用: 与上位机(PC、PLC、HMI)、其他设备或云平台通信,实现远程监控、数据记录、参数配置。
- 常用协议/接口:
- USART/UART: RS232/RS485 (通过电平转换芯片如MAX3232/MAX485) - 最常用。
- CAN: 工业现场总线,抗干扰能力强。
- Ethernet: TCP/IP通信(需带MAC的STM32或扩展PHY芯片如LAN8720)。
- WiFi/蓝牙: (需扩展模块如ESP8266, HC-05) 无线通信。
- Modbus RTU/ASCII: 工业标准通信协议,常在RS485上实现。
-
电源模块:
- 作用: 为整个系统提供稳定、不同电压等级的直流电源。
- 设计要点:
- STM32核心通常需要3.3V (部分5V tolerant)。
- 传感器、驱动电路、执行机构可能分别需要不同电压(如5V, 12V, 24V)。
- 采用合适的降压转换器(如LDO线性稳压器、DC-DC开关电源芯片)。
- 注意功率: 确保电源功率足够,特别是驱动执行机构时。
- 注意隔离和抗干扰: 强电部分(执行机构电源)与弱电部分(MCU、传感器)做好隔离(如通过继电器/光耦),电源输入端加滤波。
-
辅助电路:
- ADC信号调理: 如果传感器输出模拟信号(如压力传感器0-5V),可能需要运放进行缓冲、放大、滤波,再送入STM32的ADC引脚。
- 时钟/复位: STM32的晶振(或内部时钟)、复位电路(RC复位、看门狗)。
- 调试接口: SWD/JTAG (用于程序下载和调试)。
- 保护电路: 保险丝、TVS二极管(防浪涌)、续流二极管(保护驱动MOSFET/继电器线圈)。
三、基本工作原理(以控制进水为例 - 开关控制)
- 初始化: STM32上电,初始化所有外设(ADC, GPIO, UART, Timer等),读取设定点(可能存储在EEPROM或Flash中)。
- 数据采集: STM32周期性(通过定时器中断)读取液位传感器数据(如触发超声波测距并读取回波时间,或读取ADC采样值)。
- 数据处理: 将采集的原始数据转换成实际的液位高度值(单位:厘米或百分比)。
- 控制计算:
- 阈值控制(简单): 比较当前液位
L_current与设定点L_setpoint。- 如果
L_current < L_setpoint - Hysteresis(防止频繁震荡),则 打开 进水电磁阀/启动进水水泵。 - 如果
L_current > L_setpoint + Hysteresis,则 关闭 进水电磁阀/停止进水水泵。
- 如果
- PID控制(更平稳): 计算设定点与当前值的误差 (e = L_setpoint - L_current),经过比例(P)、积分(I)、微分(D)运算,得出控制输出量 Output(如PWM占空比)。Output 驱动执行机构(如控制阀门开度或水泵转速),使液位更平滑地趋向设定点并减小超调和震荡。
- 阈值控制(简单): 比较当前液位
- 驱动执行: STM32根据控制计算的结果,通过驱动电路(继电器、MOSFET)控制执行机构(电磁阀开闭、水泵启停/转速)。
- 人机交互: 在显示屏上实时显示当前液位、设定液位、阀门/水泵状态等信息。用户可通过按键修改设定液位或控制模式。
- 通信(可选): 定时或按需将系统状态数据通过通信接口发送给上位机。
- 报警处理: 如果液位超过安全上限或低于安全下限(可设置),系统触发报警(点亮报警灯、屏幕提示、发出声音、通信报警信号),并可能采取紧急安全措施(如强制关闭进水阀、停止水泵)。
四、系统框图(简化)
+---------------------+
| 电源模块 |----+
| (AC/DC -> 5V, 3.3V, 24V)| |
+---------------------+ |
| |
+---------V---------+ |
| | |
| STM32 MCU | |
| (ADC, GPIO, UART, | |
| Timer, PWM etc.) | |
| | |
+---------+---------+ |
| |
+-------V-------+ +-----V------+ +-------------------+
| 人机交互 | | 通信接口 | | 传感器接口 |
| (LCD, 按键) | | (UART/CAN | | (超声波/压力传感) |
+---------------+ | Ethernet..)| +---------+---------+
+------------+ |
|
+-------------------V-------------------+
| 驱动电路 (继电器/MOSFET/SSR) |
| |
+-------------------+-------------------+
|
+-------V-------+
| 执行机构 |
| (电磁阀/水泵) |
+---------------+五、软件设计要点(STM32编程 - 使用HAL库/LL库/寄存器)
- 外设初始化:
- 配置系统时钟。
- 初始化GPIO(控制LED、按键、驱动电路使能端)。
- 初始化ADC(配置通道、采样时间、DMA(可选))。
- 初始化定时器(用于产生PWM控制信号、周期采样、软件计时)。
- 初始化串口(用于调试打印、通信)。
- 初始化I2C/SPI(驱动OLED、某些传感器)。
- 传感器数据采集与处理:
- 超声波: 使用Timer捕获模式测量回波高电平时间 -> 计算距离 -> 计算液位高度。
- 模拟压力传感器: 启动ADC采样 -> 读取ADC值 -> 转换为电压 -> 根据传感器特性曲线(公式)转换为液位高度(需校准)。
- 滤波: 对原始采样数据进行软件滤波(如滑动平均滤波、卡尔曼滤波),去除噪声。
- 控制算法实现:
- 阈值控制: 简单比较判断。注意加入滞环(
Hysteresis)防止执行器在临界点频繁动作。 - PID控制:
- 实现PID结构体(存储Kp, Ki, Kd, 积分项
integral, 上次误差prev_error)。 - 在定时中断或主循环中调用PID计算函数:计算error, proportional, integral, derivative, output = P + I + D。
- 对output进行限幅(防止积分饱和或输出超出执行器范围)。
- 将output转换为PWM占空比或开关信号。
- 实现PID结构体(存储Kp, Ki, Kd, 积分项
- 阈值控制: 简单比较判断。注意加入滞环(
- 执行机构控制:
- 根据控制算法的输出,设置相应GPIO电平(开/关)或调整PWM通道的占空比。
- 人机交互任务:
- 扫描按键状态,处理按键事件(修改设定值、切换模式等)。
- 更新LCD/OLED显示内容(实时液位、设定值、状态、报警信息)。
- 通信协议处理(可选):
- 实现Modbus RTU从机协议或其他自定义协议,解析上位机命令,组织响应数据帧。
- 报警与安全逻辑:
- 检查液位是否在安全范围内。
- 检查执行机构是否按预期响应(可加超时检测)。
- 触发报警时,执行安全操作并通过界面和通信通知。
- 数据存储(可选):
- 使用STM32内部Flash或外接EEPROM存储设定点、校准参数、运行参数。
六、关键挑战与注意事项
- 传感器选择与精度: 传感器精度直接决定整个系统的控制精度。考虑环境影响(温度、压力、泡沫、蒸汽)。
- 控制算法参数整定: PID参数(Kp, Ki, Kd)对系统稳定性和响应速度至关重要。需要在实际系统中调试。
- 抗干扰设计:
- 硬件: 电源滤波、信号走线隔离(模拟/数字/功率)、屏蔽线缆、接地合理(数字地、模拟地、功率地单点连接)、TVS管、续流二极管。
- 软件: 数据滤波、看门狗定时器、异常处理、通信校验(CRC)、冗余检查。
- 执行机构响应特性: 电磁阀/水泵的响应延迟、死区会影响控制效果,算法中可能需要补偿。
- 安全可靠性:
- 硬件冗余: 关键极限位置(超高、超低)建议除了主传感器外,增加独立的浮球开关做硬线保护。
- 软件互锁: 避免进水阀和排水阀同时打开等危险操作。
- 故障诊断: 检测传感器故障、执行机构卡死、通信中断等。
- 功耗考虑: 对于电池供电应用,需选用低功耗STM32系列(如STM32L),优化休眠模式和采样频率。
- 校准: 传感器(尤其是模拟传感器)需要进行零点和满量程校准。
七、总结
设计一个基于STM32的液位控制系统,涉及到硬件选型(MCU、传感器、执行器、驱动)、电路设计(信号调理、电源、驱动、保护)、嵌入式软件开发(外设驱动、数据采集、控制算法、人机交互、通信协议)以及系统调试和优化等多个环节。核心在于精确可靠地感知液位,并通过稳定高效的控制算法驱动执行机构动作,最终实现安全的自动化控制。选择合适的传感器和控制策略(简单阈值 vs PID)对系统的成本和性能影响很大。在整个设计过程中,抗干扰和安全性是必须高度重视的方面。
你可以根据具体的应用要求(精度、成本、环境、控制对象特性),在这个框架下进行具体的硬件选型和软件实现。
如何使用LabVIEW虚拟仪器实现液位控制系统的设计
本文档的主要内容详细介绍的是如何使用LabVIEW虚拟仪器实现液位控制系统的设计。
资料下载
![]() 不会电子菜鸟
2020-04-24 08:00:00
不会电子菜鸟
2020-04-24 08:00:00
使用LabVIEW进行远程可视化液位过程控制系统的设计方案说明
提出了将虚拟仪器技术应用于过程控制和以实时图像化方式监控过程控制系统的方案; 以单容水箱液
资料下载
佚名
2019-08-14 17:42:31

基于NI LabVIEW平台实现液位控制系统的设计

人们生活以及工业生产经常涉及到液位和流量的控制问题,例如饮料、食品加工,居民生活用水的供应,溶液过滤,污水处理,化工生产等多种行业的生产加工过程
2019-12-25 08:05:00
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- amoled屏幕和oled区别
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
- 元宇宙概念龙头股一览
湘ICP备2023036445号-105