

自动驾驶分级标准
好的,自动驾驶分级标准目前国际上最广泛采用的是SAE International(国际自动机工程师学会)制定的 J3016 标准。该标准将自动驾驶技术分为 6 个等级(L0 到 L5),主要依据系统在动态驾驶任务(DDT)中的参与程度、执行范围以及是否需要人类驾驶员监督来划分。
以下是该标准的中文详细解释:
| 等级 | SAE 名称 (中文) | 关键特征 | 驾驶员角色 | 系统能力范围 (ODD) | 典型功能举例 |
|---|---|---|---|---|---|
| L0 | 无自动化 | 车辆完全由人类驾驶员控制。系统可能提供瞬时警告或干预(如紧急制动),但不持续控制车辆。 | 完全负责 所有驾驶任务。 | 不适用 | ABS, ESC, 前向碰撞预警(FCW) |
| L1 | 驾驶辅助 | 系统在特定条件下能持续控制转向 或 加减速中的一项。 | 必须全程监控环境并执行另一项任务(如控制或加速)。负全责**。 | 有限 | 定速巡航(CC), 车道居中辅助(LKA) |
| L2 | 部分自动化 | 系统在特定条件下能同时持续控制转向 和 加减速。 | 必须全程监控环境,随时准备接管。负全责。 | 有限 | 自适应巡航(ACC) + 车道居中辅助(LKA) |
| L3 | 有条件自动化 | 系统在特定条件下能执行所有动态驾驶任务(DDT)。 | 在系统请求时必须接管。系统运行时可以不持续监控环境**(如看手机)。 | 设计运行域内 | 交通拥堵辅助(TJP) |
| L4 | 高度自动化 | 系统在特定条件下能执行所有动态驾驶任务(DDT)并处理所有状况。 | 在系统设计运行域内,无需监控环境或准备接管。可无驾驶员。 | 设计运行域内 | Robotaxi (限定区域), 无人配送车 |
| L5 | 完全自动化 | 系统在任何条件、任何地点下都能执行所有动态驾驶任务(DDT)并处理所有状况。 | 无需驾驶员。可能没有方向盘/踏板。 | 无限制 | 全场景无人驾驶 |
关键概念解释:
- 动态驾驶任务: 包括车辆横向控制(转向)、纵向控制(加减速)、环境感知与监控(通过传感器)、驾驶策略(变道、转弯等)以及对事件的响应。
- 设计运行域: 指自动驾驶系统被设计运行的具体条件范围。 这包括:
- 道路类型: 如高速公路、城市道路、乡村道路等。
- 地理区域: 如特定城市、特定区域(地理围栏)。
- 速度范围: 如 0-60 km/h (用于拥堵辅助)。
- 环境条件: 如天气(晴天、雨天、雪天)、光照(白天、夜晚)。
- 交通状况: 如拥堵、畅通。
- 其他限制: 如需要高精地图覆盖的区域。
- L3 和 L4 的核心区别在于 ODD 的广度和系统在 ODD 内的能力: L3 在 ODD 内能完成 DDT,但遇到超出能力的情况需要人接管;L4 在 ODD 内能处理所有情况,无需人接管。
- 接管: 当系统遇到超出其能力范围的情况或发生故障时,会向人类驾驶员发出请求,要求其重新接管车辆控制权。这对 L3 尤其关键。
- 责任归属:
- L0-L2: 驾驶员始终是车辆操作的最终责任人,必须全程监控并随时准备接管。
- L3: 在系统激活且正常运行于 ODD 内时,系统负责驾驶任务**。但当系统发出接管请求时,驾驶员必须及时接管,否则需负责。系统在 ODD 内失效也可能导致责任争议。
- L4-L5: 在系统设计运行范围内(L4)或所有范围(L5),系统/车辆制造商是驾驶操作的主要责任人。
中国国家标准 (GB/T 40429-2021): 中国也发布了《汽车驾驶自动化分级》国家标准,与 SAE J3016 标准高度兼容,同样分为 0-5 级,定义和核心思想基本一致。细微差别在于:
- 中国标准将 L3 和 L4 合并称为“有条件自动驾驶”。
- 在具体描述上可能更侧重中国道路环境和法规要求。
重要提示:
- 当前量产车最高达到 L2/L2+ (增强版L2): 如特斯拉 Autopilot、小鹏 NGP、蔚来 NOP、理想 NOA 等。它们功能强大,但法律和本质上仍要求驾驶员全程监控和负责,属于 L2。
- L3 开始落地: 部分车型(如奔驰 DRIVE PILOT 在特定地区、本田 Legend 在特定路段)已获得 L3 认证,允许驾驶员在特定条件下(如拥堵高速)不监控道路(但需准备接管)。
- L4 主要在测试/特定场景应用: 如 Robotaxi(无人出租车)、无人配送车、港口/矿区自动驾驶等,在严格限定的地理围栏内运行。
- L5 是终极目标,尚未实现。
- 厂商宣传与实际等级: 务必注意厂商宣传的“自动驾驶”功能可能只是 L2 或 L2+,切勿过度依赖,驾驶员必须始终保持注意力。
理解这些分级有助于明确不同自动驾驶技术的实际能力、驾驶员的责任边界以及未来的发展方向。
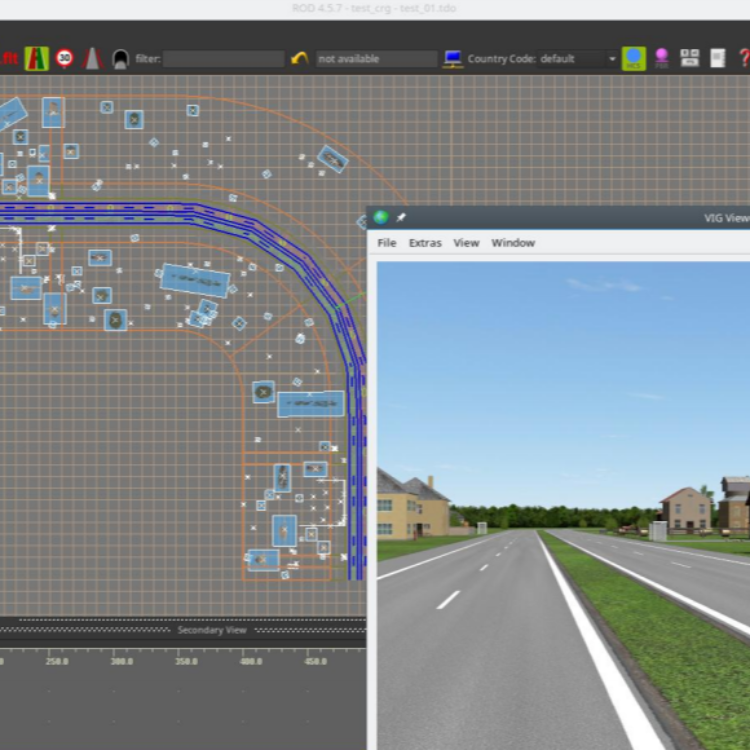
自动驾驶及智能驾驶仿真测试平台VTD
1970-01-01 08:00:00 至 1970-01-01 08:00:00
FPGA在自动驾驶领域有哪些应用?
FPGA(Field-Programmable Gate Array,现场可编程门阵列)在自动驾驶领域具有广泛的应用,其高性能、可配置性、低功耗和低延迟等特点为自动驾驶的实现提供了强有力的支持。以下
自动驾驶算法软件架构介绍
自动驾驶技术是一个庞大的工程体系,软件架构、功能算法、控制规划、感知识别、建图定位、电气架构、车载控制器、验证 体系等等,有太多的角度可以去切入。对于自动驾驶功能与算法开发,
资料下载
![]() 刘军
2023-06-01 14:41:29
刘军
2023-06-01 14:41:29
自动驾驶技术的实现
k随着汽车电子的日益复杂化以及汽车电子电气架构(EEA)的升级,人们对于联网智能汽车的需求也在逐步上升,大量先进技术往汽车上应用,如高级驾驶辅助系统(ADAS)、自动驾驶等,这些新技术也对车载网络
自动驾驶系统设计及应用的相关资料分享
作者:余贵珍、周彬、王阳、周亦威、白宇目录第一章 自动驾驶系统概述1.1 自动驾驶系统架构1.1.1 自动驾驶系统的三个层级1.1.2
网联化自动驾驶的含义及发展方向
(R17)标准。 与此同时,中国***一直以推进基于C-V2X技术的智能网联汽车发展为主线,可弥补单车自动驾驶自主感知方面的局限,让自动驾驶的
自动驾驶汽车的处理能力怎么样?
作在未来20 - 30年中,自动驾驶汽车(AV)将改变我们的驾驶习惯、运输行业并更广泛地影响社会。 我们不仅能够将汽车召唤到我们的家门口并在使用后将其送走,自
如何让自动驾驶更加安全?
最近,国内多个城市开始发放自动驾驶的开放道路测试牌照,意味着自动驾驶的汽车可以在公共道路上进行测试。不过,驾驶安全性仍是社会关注的焦点,美国优步
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- dtmb信号覆盖城市查询
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- amoled屏幕和oled区别
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
- 元宇宙概念龙头股一览
湘ICP备2023036445号-105