

PID算法的原理是什么?它的主要作用是什么?
PID是比例,积分,微分的缩写,分别代表了三种控制算法。通过这三个算法的组合可有效地纠正被控制对象的偏差,从而使其达到一个稳定的状态。
好的,我们来详细解释一下PID(比例-积分-微分)控制算法的原理和作用。
核心原理: PID控制器是一种闭环反馈控制算法。它通过连续计算“误差值”(设定点 SP - 当前值 PV),然后根据误差的比例、积分和微分进行组合计算,产生一个“控制输出”,作用在系统上,目标是将当前值尽可能地快速、平稳、准确地调整到设定点,并尽量减少稳态误差(持续存在的微小偏差)。
可以把PID看作一个有经验的操作员:
-
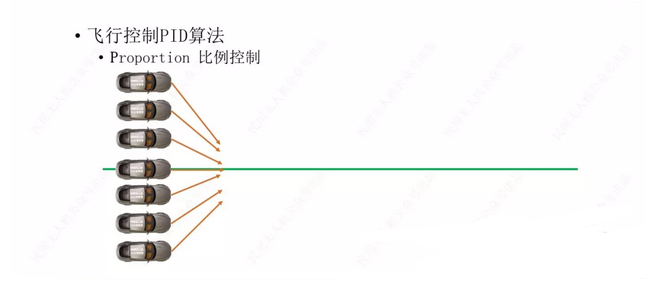
比例 (P) - 当下偏差有多大?
- 原理: 控制输出与当前的误差成正比。误差越大,输出作用力越大(加速调节)。这是最基本、最直接的反应。
- 作用: 提供快速的初步响应,尽快减小主要误差。
- 问题:
- 过冲/振荡: P太大时,系统可能反应过度,导致目标值上下震荡(像荡秋千)。
- 稳态误差: 仅靠P,当系统需要持续对抗某种干扰(如恒定的摩擦力)才能维持设定点时,输出最终会稳定在一个不足以完全抵消干扰的水平,导致PV永远无法精确等于SP(存在一个固定的微小差距)。
-
积分 (I) - 过去偏差积累了多少?
- 原理: 控制输出与误差随时间的累计总和(积分) 成正比。它关注的是误差持续存在了多久(或者说历史总误差)。
- 作用: 专门用来消除稳态误差。只要还有微小的持续误差,I分量就会随时间不断增大输出,推动PV最终精确等于SP。
- 问题:
- 响应变慢: I项对变化的反应需要时间累积,可能导致初始响应变慢。
- 积分饱和: 如果系统长时间无法达到设定点(如执行器已到极限),误差积分值会变得非常大。当设定点改变或干扰消失时,这个巨大的积分值需要很长时间才能“消耗”掉,导致严重的超调或响应延迟(“反冲”)。
-
微分 (D) - 未来偏差会怎么变?
- 原理: 控制输出与误差的变化率(微分) 成正比。它预测误差未来的趋势(比如误差是正在快速增大还是减小)。
- 作用:
- 阻尼作用: 当误差正快速减小时(比如快要接近目标了),D输出一个负的(制动的)作用力,帮助“刹住车”,防止系统冲过头(减小过冲),稳定系统(减小振荡)。
- 提前响应: 当误差刚开始出现快速增大的苗头时(即使绝对值还不大),D就提前施加一个较大的控制作用来抵抗这个趋势。
- 问题:
- 对噪声敏感: 测量值中的微小噪声(波动)会被D项放大,导致控制输出不稳定地抖动。通常需要对测量信号进行滤波或在D项加入低通滤波。
- 系统参数敏感: D项的效果对系统模型的准确性更敏感。
PID控制器的输出公式(理想形式):
控制输出(t) = Kp * e(t) + Ki * ∫ e(τ) dτ (从0到t) + Kd * (de(t)/dt)其中:
e(t) = 设定点(SP) - 当前值(PV)是时刻 t 的误差。Kp:比例增益(放大倍数)。Ki:积分增益(Ki = Kp / Ti,Ti是积分时间常数)。Kd:微分增益(Kd = Kp * Td,Td是微分时间常数)。
主要作用:
PID控制器最主要的作用是实现精确、稳定、快速的自动控制。具体表现在:
- 减少或消除稳态误差: 通过积分 (I) 的作用,系统最终能精确达到设定点,没有持续的小偏差。
- 减小超调量和调节时间: 通过比例 (P) 提供初始响应速度,微分 (D) 提供预测性的“减速”作用,让系统更快、更平稳地到达设定点,减少来回震荡。
- 提高系统稳定性: 尤其是在克服振荡倾向方面,微分项(D)的作用至关重要。
- 增强抗干扰能力: 当外界干扰(如负载变化、环境温度波动)使当前值(PV)偏离设定点时,PID控制器能快速检测到误差变化,并通过其组合输出作用调整执行机构,努力将PV拉回到SP。
- 适应性和广泛性: PID的原理清晰直观,参数调整相对有迹可循(尽管调参有时需要经验),使其成为工业控制中应用最广泛的控制器,能够处理从简单到复杂的多种控制问题。
简单总结:
PID就像一个聪明的“纠错”管家:
- P (现在错了多少?): 立刻用大力气拉回来。缺点:拉太猛会冲过头,且可能差一点点到不了。
- I (以前欠了多久的账?): 保证“欠的账”一定要还清,最终必须精确到位。缺点:还账动作慢,攒多了容易“用力过猛”。
- D (将要错多快?): 根据趋势提前预判用力刹车或加油,让过程更稳更快。缺点:对噪声太敏感,容易一惊一乍。
应用举例:
- 汽车定速巡航:油门大小自动调节,维持恒定车速(对抗风阻、坡度变化)。
- 恒温箱:加热/制冷功率自动调节,维持设定温度(对抗环境温度变化、开门)。
- 无人机悬停:电机转速自动调节,维持高度和姿态稳定(对抗气流)。
- 化工反应釜:流量阀控制,精确添加反应物配料(对抗压力波动、粘滞)。
- 3D打印机喷头:加热功率控制,维持精确熔融温度。
总之,PID控制器通过巧妙组合“看现在”、“算旧账”、“看趋势”三种策略,实现了在各种复杂环境下对物理量进行精确、稳定、快速的控制,是现代自动化的基石之一。
飞行控制PID算法的作用解析
PID控制器是一种线性控制器,它主要根据给定值和实际输出值构成控制偏差,然后利用偏差给出合理的控制量,目前,人们通过科学研究获得了诸多具有优异控
2023-11-27 10:57:06
PID控制中P、I、D参数的作用是什么
PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让控制器到达最佳控制效果。
资料下载
![]() 姚小熊27
2021-05-27 15:38:40
姚小熊27
2021-05-27 15:38:40
使用单片机和Arduino实现增量式PID位置式PID算法和PID库免费下载
本文档的主要内容详细介绍的是使用单片机和Arduino实现增量式PID位置式PID算法
资料下载
佚名
2020-05-28 16:30:07
电机控制算法的作用是什么
灵敏了,忽左忽右,不是很稳定。后来查了资料后知道了其他的调节方式。控制算法电机控制算法的作用是接受指令速度值,通过运算向电机提供适当的驱动电压,
镍镉电池是什么,它的主要作用是什么
粉和石墨粉组成,石墨不参加化学反应,其主要作用是增强导电性。负极板上的活性物质由氧化镉粉和氧化铁粉组成,氧化铁粉的作用是使氧化镉粉有较高的分散性
2021-03-17 17:33:20
收藏干货 PID算法实现
有利, 它加快了系统的跟踪速度。但微分的作用对输入信号的噪声很敏感,对那些噪声较大的系统一般不用微分, 或在微分起作用之前先对输入信号进行滤波。
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- dtmb信号覆盖城市查询
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105