

pid参数整定的技巧及对系统会造成什么影响?
在整定PID控制器参数时,可以根据控制器的参数与系统动态性能和稳态性能之间的定性关系,用实验的方法来调节控制器的参数。
好的,我们来详细探讨一下PID参数整定的技巧及其对系统的影响。
PID参数整定技巧
PID控制器(比例-积分-微分控制器)的参数整定是控制工程中的核心任务之一。没有放之四海而皆准的“完美”方法,通常需要结合理论、经验和反复调试。以下是一些关键的整定技巧:
-
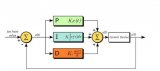
理解PID作用和参数含义:
- Kp (比例增益):与当前误差成正比。增大Kp会加速系统响应、减小稳态误差,但过大会导致超调增大、甚至振荡或不稳定。
- Ki (积分增益 / 积分时间Ti的倒数):与误差的累积量(积分)成正比。主要用于消除稳态误差。增大Ki(或减小Ti)能更快消除静差,但会降低稳定性、增加超调、甚至引起振荡。积分饱和是需要防范的副作用。
- Kd (微分增益 / 微分时间Td):与误差的变化率(微分)成正比。能预测未来误差趋势,提供阻尼作用。增大Kd(或增大Td)有助于减小超调、抑制振荡、提高稳定性。但对测量噪声极其敏感,过大也可能导致系统不稳定或被噪声淹没。
-
选择适当的整定方法:
- 工程经验法/试凑法:
- 步骤1:只调比例(Kp)。将Ki和Kd设为0。逐渐增大Kp直到系统开始振荡(或响应达到临界稳定点),记录此时临界振荡的临界增益Kcr和振荡周期Tcr(临界周期),并将Kp设为Kcr的一半左右作为初始值。
- 步骤2:加入积分(Ki)。保持Kp不变,逐渐增大Ki(或减小Ti),目标是消除稳态误差。观察响应,如果超调过大或振荡加剧,需要适当减小Ki(或增大Ti)或减小Kp。
- 步骤3:加入微分(Kd)。保持Kp和Ki不变,逐渐增大Kd(或增大Td)。目标是抑制超调和平息振荡。注意噪声放大问题。微分量通常不宜过大。
- 反复微调:三个参数相互影响,需要反复来回微调观察响应,达到满意效果(如快速性、超调量、稳态精度、抗扰性的平衡)。
- Ziegler-Nichols整定法:
- 临界比例度法:如上所述,通过实验(如闭环临界振荡测试)测得Kcr和Tcr。根据经验公式(针对阶跃输入)计算Kp, Ti, Td。
- 响应曲线法:对开环系统施加阶跃输入,记录响应曲线(阶跃响应)。在S形曲线的拐点处作切线,确定等效滞后时间L和时间常数T。根据经验公式计算Kp, Ti, Td。
- 优点:提供系统性起点。
- 缺点:临界振荡法可能风险高;公式基于特定响应模型,实际系统可能不满足,得出的参数通常比较激进,需要作为起点进一步微调。
- Lambda整定法 (Internal Model Control - IMC Tuning):
- 基于被控过程的模型(传递函数)。
- 设定一个期望的闭环响应时间 (τc,通常称为Lambda)。λ越小,响应越快但也更激进;λ越大,响应越慢但更鲁棒。
- 根据模型类型(如:一阶时滞模型、积分模型等)和设定的λ值,计算PID参数。
- 优点:计算相对简单,能平衡性能和鲁棒性。
- 缺点:需要被控对象的模型(至少是简化模型),模型精度影响整定效果。
- 软件辅助整定:
- 许多现代控制系统和仿真软件(如MATLAB/Simulink, LabVIEW, PLC编程软件中的自整定工具)提供自动或半自动整定功能。
- 原理:通常基于阶跃响应测试、继电器反馈振荡测试等获取系统动态特性,然后应用算法(如基于模型的优化、模糊逻辑等)计算或建议参数。
- 优点:方便、快捷、可避免高风险测试,能处理更复杂的系统。
- 缺点:依赖于软件算法和测试激励信号的质量,结果仍需工程师评估和微调。
- 工程经验法/试凑法:
-
关键调试技巧与原则:
- 循序渐进:从零开始(Ki=0, Kd=0),先调好Kp达到基本稳定响应;再引入I消除静差;最后引入D改善动态性能。
- 小步调整:每次只调整一个参数,且调整幅度宜小,观察系统响应变化后再决定下一步。
- 关注关键指标:在阶跃响应测试中,主要观察:
- 上升时间:响应速度(希望快)。
- 超调量:超出设定值的幅度(希望小)。
- 调节时间:回到稳态误差带内的时间(希望短)。
- 稳态误差:最终偏离设定值的幅度(希望为零或足够小)。
- 抗扰性:施加干扰后系统恢复的能力。
- 权衡取舍:性能指标往往是相互矛盾的(如快速性与超调/振荡)。整定目标通常是在满足稳定性前提下的一个平衡(如:允许一定超调但达到快速响应,或者稍慢响应但无超调和振荡)。
- 重视微分噪声:如果系统测量噪声大,微分作用Kd要慎重使用或调小,最好配合测量滤波。
- 积分饱和:理解积分饱和现象(控制器输出限幅时积分累积过大导致恢复延迟)并采取措施(如抗积分饱和算法)。
- 模型辅助与仿真:如有条件,建立数学模型在仿真中初步整定,可大大提高效率并降低现场风险。
- 记录与比较:记录调试过程中的参数组合和响应曲线,方便回溯和比较。
- 考虑实际工况:整定参数应适应系统的主要工作点及负载变化情况,有时需要多个工作点的折中或增益调度。
PID参数对系统造成的影响
不当的PID参数会显著影响系统的动态和静态性能:
-
比例增益 (Kp) 过大:
- 优点:响应速度加快,稳态误差减小。
- 缺点:
- 超调量增大:系统更容易冲过设定值。
- 振荡加剧:系统可能围绕设定值反复波动,甚至发散(不稳定)。
- 对噪声更敏感:比例放大会放大测量噪声。
- 结果:系统可能变得不稳定、震荡剧烈、噪声放大明显。
-
比例增益 (Kp) 过小:
- 优点:系统稳定,甚至可能不振荡。
- 缺点:
- 响应迟缓:系统达到设定值所需时间很长。
- 稳态误差大:最终无法精确达到设定值(特别对负载变化大的系统)。
- 结果:系统迟钝,调节精度差,抗干扰能力弱。
-
积分增益 (Ki) 过大 (或积分时间Ti过小):
- 优点:消除稳态误差的能力增强(更快)。
- 缺点:
- 超调量显著增大:积分累积过快导致系统冲过头。
- 振荡加剧甚至不稳定:积分过强引入过度“记忆”,破坏稳定性。
- 积分饱和风险增加:当控制器输出长时间限幅时,积分项会过度积累,导致系统脱离饱和状态后恢复过慢(出现“失控”或延迟响应)。
- 结果:系统可能变得非常振荡、不稳定、或在设定点附近“游荡”,恢复慢。
-
积分增益 (Ki) 过小 (或积分时间Ti过大):
- 优点:对系统稳定性影响小。
- 缺点:
- 消除稳态误差缓慢:系统可能需要很长时间才能达到或接近设定值。
- 存在显著残余误差:尤其在常值扰动存在时。
- 结果:系统精度低,难以达到设定值。
-
微分增益 (Kd) 过大 (或微分时间Td过大):
- 优点:可以显著降低超调,抑制振荡。
- 缺点:
- 对噪声极其敏感:轻微噪声会被放大很多倍,导致执行机构高频抖动(可能损坏设备或加速磨损)。
- 可能导致不稳定:在高阶系统中或参数特别大时。
- 增大调节时间:微分可能过度“刹车”,导致响应变慢。
- 结果:系统可能因噪声而剧烈跳动,甚至不稳定或响应迟钝。
-
微分增益 (Kd) 过小 (或微分时间Td过小):
- 优点:对噪声影响小。
- 缺点:
- 抑制振荡能力弱:无法有效预测并抑制超调。
- 超调量较大:系统控制不够“提前”。
- 结果:系统超调难以控制,响应可能呈现“欠阻尼”特性(过冲后多次振荡收敛)。
总结来说,PID参数整定是一个需要结合理论、经验和反复实践的过程。其核心是理解P、I、D三个环节的物理意义和控制效果(加速响应、消除误差、抑制超调),并在快速性、稳定性、精度和抗干扰性/鲁棒性之间找到一个好的平衡点。参数不当会导致系统响应缓慢、精度不足、剧烈振荡、不稳定甚至设备损坏。 调试时常说的一句话是:“整定PID是三分科学,七分艺术”,反映了其灵活性和经验依赖性的特点。
PID控制中如何整定PID参数
可以得到各种输出响应特性,也就是说,通过适当给定PID参数,大多数的控制任务都可以由PID完成。本文根据经典
资料下载
![]() 姚小熊27
2021-06-01 10:28:01
姚小熊27
2021-06-01 10:28:01
PID参数整定的方法
时Dout会有非常尖的尖峰,这时就要对delError进行限幅。在PID调节中,不允许出现很大的尖峰。 调好D后,NowVal会很好的跟随TargetVal的变化而变化。 三、看图
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- amoled屏幕和oled区别
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105