

激光雷达的种类和特点
好的,激光雷达(LiDAR,Light Detection and Ranging)种类繁多,按照不同的分类方式可以划分为多种类型。以下是几种常见的分类方式及其主要特点:
一、按扫描方式划分(最常见分类)
-
机械旋转式激光雷达 (Mechanical Rotating LiDAR)
- 特点:
- 工作原理: 激光发射器和接收器安装在一个高速旋转的平台上(外露或部分外露),发射的激光束通过旋转实现360°水平扫描。
- 优点:
- 视场角大: 通常具有水平360°全方位视野。
- 技术成熟: 是最早商业化的激光雷达技术,技术相对成熟、稳定。
- 点云质量高: 点云密度均匀,探测距离较远(尤其在早期)。
- 缺点:
- 体积大、重量重: 包含复杂的旋转部件。
- 成本高: 精密机械部件导致制造成本高。
- 可靠性挑战: 高速旋转的机械部件易磨损、抗震性较差、对环境(如尘土、水汽)敏感,寿命受限。
- 转速限制性能: 帧率受限于旋转速度。
- 应用: 早期自动驾驶原型车(如Google早期的Waymo),高精度测绘(机载、地面站)。
- 特点:
-
混合固态激光雷达 (Hybrid Solid-State LiDAR / Semi-Solid-State LiDAR)
- 特点:
- 工作原理: 消除了大幅度的外部机械旋转结构,通常采用振镜(如MEMS)、旋转棱镜/透镜等微动装置来偏转激光束实现扫描。部分可能包含有限角度的旋转底座。
- 代表技术: MEMS微振镜激光雷达、旋转棱镜式激光雷达。
- 优点:
- 体积重量减小: 比纯机械式大幅减小。
- 成本有望降低: 简化机械结构,减少精密部件,利于规模化生产。
- 可靠性提高: 减少了活动部件(MEMS振镜非常小且坚固),抗震性和环境适应性更好。
- 扫描模式灵活: 可以通过控制扫描元件实现不同的扫描模式(如ROI感兴趣区域扫描)。
- 帧率可调性高: 扫描速度更易控制。
- 缺点:
- 视场角限制: 水平视野通常小于360°(常见90°-120°,少数更高),需要通过多个雷达组合实现全视角覆盖。
- 点云均匀性/探测距离: 相比高端机械式,点云边缘密度可能降低,探测距离可能稍逊于顶级机械式(但随着技术发展差距缩小)。
- 技术挑战: MEMS振镜的寿命、稳定性、光学系统设计等仍是挑战。
- 应用: 当前主流车载激光雷达,机器人导航,无人机避障。
- 特点:
-
纯固态激光雷达 (Pure Solid-State LiDAR)
- 特点:
- 工作原理: 没有任何宏观运动的机械扫描部件。通过电子方式控制激光发射和接收来实现光束扫描或形成凝视探测点阵。
- 代表技术:
- 光学相控阵: 利用阵列单元干涉原理控制激光束相位,实现无机械扫描(电子扫描)。
- Flash: 一次性向整个视场发射大面积激光脉冲,利用面阵探测器接收回波,形成瞬时2D/3D图像。本质上是“面阵成像”。
- 优点:
- 极高可靠性: 无运动部件,理论上寿命极长,抗震性极佳,完全密封设计,对恶劣环境耐受性最好。
- 体积小、成本潜力大: 结构简单紧凑,可微型化,易于芯片化集成,规模化生产后成本有望显著降低。
- 扫描速度快: 电子扫描速度远高于机械扫描(尤其OPA和Flash)。
- 缺点:
- 技术成熟度: OPA和Flash技术难度极大,目前(截至2024年初)量产落地应用较少。
- 视场角与分辨率: OPA:视场角和扫描角度有限(目前水平较难做大),存在旁瓣效应等技术难点; Flash:探测距离通常较短(受制于单次发射能量分散),分辨率受探测器分辨率限制,抗环境光干扰能力弱。
- 成本: 目前高分辨率、远距离的纯固态雷达成本仍然很高。
- 应用: 未来车载应用(尤其短距离补盲)、机器人感知、消费电子产品(如高端手机测距/建模)。
- 特点:
二、按测距原理划分
- 飞行时间法:
- 脉冲式: 测量激光脉冲往返的直接飞行时间计算距离。最主流的方式,结构相对简单,抗环境光干扰能力较强。易实现多通道探测(多线束)。
- 间接式: 通过测量发射和接收激光束之间的相位差来间接计算飞行时间。测量精度高,功耗相对较低,但易受多径效应干扰,测程相对受限。
- 调频连续波法:
- 工作原理: 发射频率随时间连续变化的激光束(Chirp),接收回波并与部分发射光进行混频,产生差频信号。差频频率与目标距离成正比,差频信号的相位则对应于目标的速度(多普勒频移)。
- 优点: 能同时测量距离和速度信息(点云自带速度矢量);测距精度极高;抗干扰能力强(天然抗其他激光雷达和环境光干扰,特别适合多雷达同时工作场景);信噪比高。
- 缺点: 系统复杂性高,成本相对较高;扫描方式通常依赖混合固态或固态(因需要处理复杂信号,常与MEMS等技术结合)。
- 代表技术: FMCW LiDAR。
三、按发射激光波长划分
- 905 nm:
- 优点: 硅基光电探测器(如APD)对该波长灵敏度很高,成熟且成本低;大气穿透性相对较好。
- 缺点: 人眼安全性阈值较低,限制了发射功率上限(从而限制了探测距离),在高功率下使用时需严格控制人眼安全。
- 1550 nm:
- 优点: 人眼安全性阈值远高于905nm(约40倍),允许使用更高的发射功率,从而实现更远的探测距离(轻松可达数百米甚至更远);大气传输性能在某些条件下更优(尤其有雾或小雨时)。使用铟镓砷探测器(InGaAs)。
- 缺点: InGaAs探测器成本显著高于硅基探测器;1550nm光源(如光纤激光器)通常成本也更高。系统整体成本和功耗可能更高。
- 应用: 对探测距离有极高要求的场景(如L4/L5自动驾驶主雷达、高速铁路监测)。
四、按线束数量划分
- 单线激光雷达:
- 一次扫描只产生一条扫描线(一个点云平面)。
- 成本低廉,体积小巧。
- 应用:扫地机器人定位与避障、AGV导航、二维场景建模。
- 多线激光雷达:
- 通过多个激光器发射单元(或分时光束)实现垂直方向的多条扫描线同时扫描(如4线、8线、16线、32线、64线、128线甚至更高)。
- 线束越多,垂直方向分辨率越高,点云密度越大,感知越精确。但成本也急剧上升。
- 应用:主流应用于自动驾驶汽车(如16线、32线、64线、128线)、无人机三维测绘、机器人三维环境感知。
五、按功能架构划分
- 发射模块: 激光光源(VCSEL/EEL/Fiber Laser)、驱动电路、光学整形系统。
- 扫描模块: 实现激光束空间扫描的装置(如旋转反射镜、MEMS振镜、棱镜、OPA阵等)。
- 接收模块: 光电探测器(APD/SPAD/SiPM)、放大电路、时间测量单元(如TDC或信号处理芯片)。
- 控制处理模块: 主控芯片(FPGA/ASIC/MCU)、点云生成算法、数据接口。
- 光学系统: 反射镜、透镜、窗口等,负责光束的准直、扩束、聚焦和透射/接收。
总结特点对比
- 扫描方式:
- 机械旋转式: 360°全景覆盖,性能强但笨重昂贵不耐用。
- 混合固态: 折中方案,体积重量减小,可靠性提高,成本潜力大,成为车载主流。
- 纯固态: 终极形态,体积小、可靠性最高、成本潜力最大,是未来趋势,但技术仍在突破中(FMCW尤其OPA/Flas)。
- 测距原理:
- TOF脉冲式: 成熟主流,测程远。
- TOF相位式: 精度高,测程有限。
- FMCW: 同时测距测速,抗干扰强,精度极高,是下一代技术方向。
- 波长:
- 905nm: 性价比高,适合中短距。
- 1550nm: 人眼安全距离远,测程远,适合高性能长距场景。
- 线数:
- 单线: 低维感知,低成本。
- 多线: 三维感知,线数越多性能越强,成本越高。
选择哪种激光雷达取决于具体的应用场景、性能要求(探测距离、精度、分辨率、视场角)、成本预算、可靠性要求以及尺寸重量限制。目前车载领域,混合固态激光雷达(尤其是MEMS和棱镜/转镜式)与TOF脉冲测距结合是主流方案,1550nm波长和高线束(64线以上)产品在高阶自动驾驶中应用增多。而FMCW和纯固态技术被视为未来的重要发展方向。
激光雷达集成系统ILS

1970-01-01 08:00:00 至 1970-01-01 08:00:00
激光雷达的结构与种类
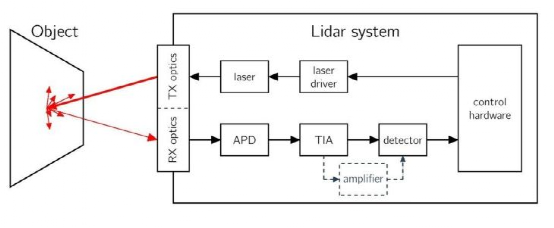
放大器)和探测器,如图所示。其中除了发射和接收光学镜头外,都是电子部件。随着半导体技术的快速演进,性能逐步提升的同时成本迅速降低。但是光学组件和旋转机械则占具了激光雷达的大部分成本。 二、激光雷达的
2023-07-14 11:14:04
什么是激光雷达技术?激光雷达的种类分为几种?

激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成 传统的雷达是微波和毫米波波段的电磁波为载波的雷达 是一家能提供单点、单线
2022-01-24 10:08:43
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 如何进行编码器的正确接线?接线方法介绍
- 什么是场效应管?它的作用是什么?
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- amoled屏幕和oled区别
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 苹果笔记本macbookpro18款与19款区别
- 通讯隔离作用
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105