

自平衡小车主控板pcb
好的,我们来详细讲讲自平衡小车主控板 PCB 的设计要点(用中文)。设计一块稳定可靠的主控板 PCB 是自平衡小车项目中至关重要的硬件基础。
设计理念: 核心是稳定、集成、抗干扰,为微控制器 (MCU) 提供可靠的运行环境,并高效连接所有传感器和执行器。
关键模块与设计要点:
-
微控制器 (MCU) 核心:
- 选型: 通常选择 ARM Cortex-M 内核的 MCU(如 STM32F1/F4/F7/H7 系列、GD32、ATSAM、K210 等),因其性能强劲、外设丰富、功耗相对较低、生态系统完善。STM32F4 系列(如 F401/F411/F405/F407)因其 FPU(浮点单元)和性能/价格平衡而非常流行。
- 设计:
- 电源去耦: 极其重要! 在每个电源引脚(VDD/VSS/VCC/GND)附近放置 0.1uF (104) 陶瓷电容,并尽可能靠近引脚。对于主电源入口,额外并联一个 4.7uF 或 10uF 的电容。使用多层板时,确保电源层和地层完整。
- 复位电路: 设计可靠的复位电路(通常包含一个复位按键和上拉电阻,可选择添加电容进行延时滤波)。
- 晶振电路: 为主时钟(通常 8MHz)和可能的低速时钟(32.768kHz,用于RTC)提供精确的外部晶振。晶振及其匹配电容 (CL1, CL2, 典型值 10-22pF) 必须紧靠 MCU 的 OSC_IN/OSC_OUT 引脚布线,下方保持完整地平面,避免其他信号穿越。
- 启动配置: 正确设置 BOOT0/BOOT1(或其他启动引脚)的上下拉电阻,确保 MCU 按预期启动模式启动。
- 调试接口: 必须引出 SWD (Serial Wire Debug) 接口(SWDIO, SWCLK, GND, RESET, VCC),用于程序下载和调试。连接器靠近 MCU 放置。
- 未用引脚: 建议将未使用的引脚配置为模拟输入或输出低电平,避免浮空状态引入噪声功耗。
-
姿态传感器 (IMU - Inertial Measurement Unit):
- 选型: 最常见且性价比高的是 MPU6050(集成 3轴陀螺仪 + 3轴加速度计 + DMP)。更高端可选 MPU9250(+磁力计)、BMI160、ICM-20600/20948(性能更好,内置DMP/FIFO)等。
- 设计:
- 布局: 极其关键! IMU 必须 牢固安装在 PCB 上,且 PCB 本身必须刚性固定在小车的核心结构上。IMU 的 X/Y/Z 轴方向应与小车的前进方向(Y)、左右方向(X)、上下方向(Z)严格对齐。
- 去耦: 电源引脚旁放置 0.1uF 电容。
- 通信: MPU6050 主要使用 I2C 接口(SDA, SCL)。线路上串联 100Ω - 470Ω 电阻(靠近 IMU 端)有助于抑制反射、增强信号完整性。上拉电阻一般为 4.7KΩ(如果 MCU 内部上拉足够强,有时可省略)。
- 滤波: 在 IMU 的模拟供电脚(如 VDD/VLOGIC)可考虑增加一个 RC 低通滤波(例如 10Ω + 10uF)。
- 接地: IMU 下方保持完整地平面。
- 中断 (INT): 如果使用 DMP 或 FIFO 溢出中断,需要连接到 MCU 的外部中断引脚。
- 辅助 I2C: 如果 IMU 支持辅助 I2C(如 MPU6050 连接 HMC5883L 磁力计),确保线路正确连接。
-
电机驱动:
- 选型: 常见方案:
- 专用驱动 IC: TB6612FNG、DRV8833、L298N(发热大,效率低,不推荐新设计)、DRV8871(单路)、BD623x/BD624x、A4950 等。集成度高,自带保护,易于控制。
- MOSFET 半桥/全桥: N+P MOS 组合(如 IRF3205 + IRF4905),需配套驱动芯片(如 IR2104, IR2110)和自举电路。性能上限高,成本可能略高,设计更复杂。
- 设计:
- 功率回路: 绝对重点! 设计低阻抗、短而宽的功率走线(VBAT -> 驱动芯片 -> 电机 -> GND)。电机电流路径(特别是 VBAT 输入和 GND 回路)要粗短(至少 1mm 宽,根据电流加宽),避免形成回路面积。
- 去耦: 在驱动芯片的电源输入引脚(VM/VCC)和功率地(PGND)之间,紧靠引脚放置 大容量电解电容 (100uF - 1000uF) 和 陶瓷电容 (0.1uF - 10uF)。这是吸收电机反电动势和开关噪声的关键!逻辑电源 VCC/VDD 也需要 0.1uF 去耦。
- 散热: 如果驱动芯片功耗较大(如 L298N、大电流 MOS 桥),必须设计足够大的 铜箔区域散热,甚至可能需要散热片。PCB 铜厚(2oz)和散热过孔(VIA)有助于散热。
- 逻辑控制: PWM 输入、使能控制、方向控制等信号线连接到 MCU。可串联小电阻(22Ω - 100Ω)限制边沿速率,减少 EMI。
- 电流检测 (可选): 如果需要电流环控制或过流保护,需设计电流采样电路(精密电阻 + 运放)。
- 接地: 区分 功率地 (PGND) 和 信号地 (AGND/SGND)。在驱动芯片处通过 单点连接(通常是一个 0Ω 电阻或磁珠),避免大电流噪声污染敏感的模拟/数字地。功率地平面要尽可能完整。
- 隔离: 驱动芯片的控制逻辑部分与功率部分尽量物理隔离布线。避免敏感信号线(如 IMU 走线)靠近功率走线或平行长距离走线。
- 选型: 常见方案:
-
电源管理:
- 输入电源: 通常使用 7.4V - 12.6V(2S 或 3S)锂电池。
- 锂电池保护/管理板: 强烈建议外接或集成带有过充、过放、过流、短路保护的锂电池保护板。
- 电压转换:
- 主降压: 将电池电压 (VBAT) 降至 MCU、传感器、逻辑电路所需电压(通常是 3.3V)。选择高效率 (>85%)、电流能力足够(>500mA)的 DC-DC 降压 (Buck) 转换器 (如 MP1584, XL1509, LM2596S, TPS5430/54331, AP62300)。注意输入/输出电容选型和布局(靠近芯片,参考手册)。
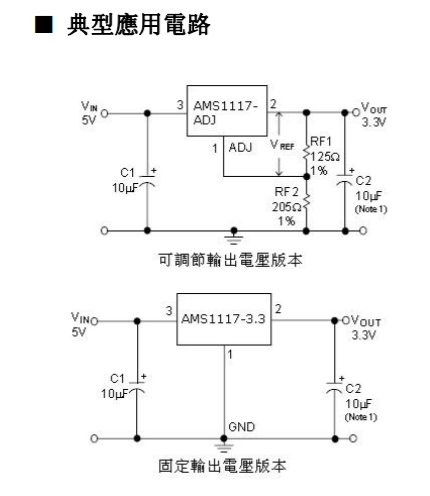
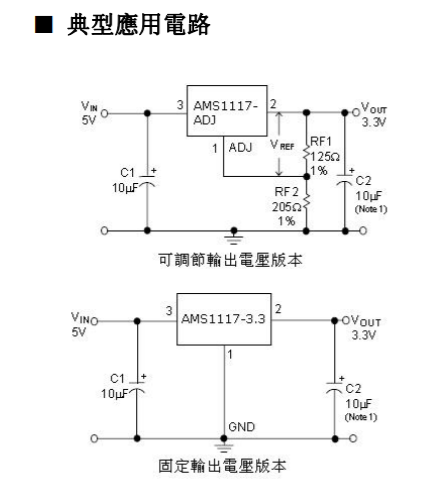
- LDO (可选): 对于噪声敏感的模拟部分(如 IMU),可在 Buck 输出后再加一级低压差线性稳压器(LDO,如 AMS1117-3.3, LD1117)进行二次稳压和噪声过滤。
- 电机驱动电源: 通常直接使用 VBAT。
- 设计:
- 输入滤波: Buck 转换器输入前端放置大容量电解电容(如 100uF)和陶瓷电容(10uF, 0.1uF)。
- 输出滤波: Buck 输出端放置推荐的电解电容和陶瓷电容组合。LDO 输入/输出端放置推荐的电容。
- 电压监测 (可选但推荐): 通过电阻分压器连接到 MCU 的 ADC 引脚,实时监测电池电压,实现低压报警或自动关机。
- 电源指示灯。
-
通信与接口 (可选但常用):
- 串口 (UART): 用于调试输出、连接蓝牙模块(如 HC-05, HC-06, JDY-31)或 WiFi 模块(如 ESP-01S, ESP8266)。
- 无线模块接口: 为蓝牙/WiFi 模块预留串口、电源(VCC/GND)、状态引脚(STATE/EN)的焊盘或排针/座。
- 扩展 IO: 预留一些 GPIO 引脚排针,方便连接超声波模块、舵机、额外的传感器等。
- 编码器接口 (如果使用带编码器电机): 为电机编码器的 A/B 相提供连接器(通常用板对板连接器或排针),并连接到 MCU 的定时器编码器接口引脚(TIMx_CH1, TIMx_CH2)。
-
PCB 布局与布线:
- 模块化分区: 将不同功能的电路分区放置:MCU及外围、传感器区、电机驱动区、电源区、接口区。
- 敏感信号优先: 先布晶振线(短且对称)、IMU 的 I2C 线(尽量短直)、复位线(避免过长)。
- 电源分层: 多层板(>=4层)是首选。典型的层叠:顶层(信号) -> 地层 -> 电源层 -> 底层(信号)。确保关键区域(MCU, IMU)有完整的地平面覆盖。双层板则需精心设计电源和地线网格。
- 地平面完整性: 至关重要! 保持地平面尽可能完整,避免被信号线分割得支离破碎。避免敏感信号在地平面缝隙上跨越。
- 信号完整性:
- 差分走线: 如果使用 USB 或高速信号,进行差分对布线。
- 阻抗控制: 对于高速信号(如 >10MHz),考虑特性阻抗(通常 50Ω),但自平衡小车大部分信号速率不高,典型双层板按常规线宽间距设计即可。
- 环路面积最小化: 尤其针对功率回路(VBAT->Driver->Motor->GND)和高 di/dt 回路(Buck 转换器的 SW 节点)。减小环路面积可降低辐射 EMI。
- 3W 原则: 高速信号线之间间距 >= 3倍线宽,以减少串扰。
- 避免锐角: 布线使用 45°转角或圆弧。
- 过孔使用: 合理使用过孔连接不同层。功率路径使用多个过孔并联降低电阻和电感。避免在关键模拟区域(晶振、IMU 下方)随意打过孔。
- 散热考虑: 功率元件(Buck IC, MOS 管, 驱动 IC)下方铺铜,打散热过孔阵列(VIA)连接到内层或底层的地/电源平面进行散热。
- 丝印标注: 清晰标注元件位号(R1, C5, U3)、接口功能(VCC, GND, PWM1, SDA, TX)、PIN1 方向、电压值等。
- 测试点: 关键信号点(电源、地、PWM、传感器信号)添加测试点(焊盘),方便调试和测量。
- 固定孔: 设计安装孔(螺丝孔),保证 PCB 能稳固地安装在小车底盘上。孔周围留出足够的无元件区域。
-
设计验证与调试:
- DRC (设计规则检查): 制板前务必运行 PCB 软件的 DRC,检查线宽、间距、孔径等是否符合厂家能力和设计要求。
- 连接性/短路检查: 使用软件的 ERC/DRC 检查电气规则。
- 电源短路初步测试: 收到 PCB 后,焊接最小系统(电源、MCU、晶振、复位、SWD),上电前用万用表二极管档测量 3.3V 与 GND 之间是否短路,VBAT 与 GND 是否短路。
- 分步上电调试: 先焊接电源部分,测试输出电压是否正确。然后焊接 MCU 最小系统,测试能否下载程序。再焊接其他模块(IMU、驱动),逐个测试。
- 示波器: 必备工具,用于查看电源纹波、PWM 波形、通信信号波形(I2C)、晶振波形等。
总结自平衡小车主控板 PCB 设计的核心原则:
- 电源是根基: 干净、稳定的电源是系统可靠运行的前提。重视去耦电容的布局!
- 地是生命线: 完整、低阻抗的地平面是抗干扰、保信号的基石。处理好功率地和信号地的关系。
- IMU 是核心传感器: 其布局、安装方向、走线质量直接影响姿态解算精度,必须小心对待。
- 电机驱动是大噪声源: 功率走线短粗、去耦电容到位、散热良好、隔离噪声是设计关键。
- 抗干扰设计贯穿始终: 分区、分离、滤波、屏蔽(地平面)、减小环路面积。
设计这样的 PCB 需要综合考虑电气性能、机械结构、热管理和成本。建议使用专业的 EDA 软件(如 Altium Designer, KiCad, Eagle, EasyEDA)进行设计,并仔细阅读所有关键器件的数据手册和应用笔记。多参考成熟的开源设计方案(如基于STM32的自平衡小车项目)也是很好的学习途径。祝你设计成功!
mbot编程主控板模块名称及作用
Mbot是一款面向教育和初学者的机器人套件,它通常包括一个主控板、传感器、电机驱动器、电池和其他组件。主控板是Mbot的核心,负责处理传感器数据、控制电机和其他电子模块。以下是Mbot
2024-10-18 09:41:35
从三个层次来介绍用于机器人主控板的设计思想
在很多人眼里,主控板有着密密麻麻的芯片引脚与PCB走线,看起来非常难的样子。其实恰恰相反,主控板的设计有着其特有的设计规律,其实说白了就像搭积木
2023-05-18 11:43:02
机器人主控板设计方案
在很多人眼里,主控板有着密密麻麻的芯片引脚与PCB走线,看起来非常难的样子。 其实恰恰相反,主控板的设计有着其特有的设计规律,其实说白了就像搭积
2023-03-16 14:32:06
基于stm32的两轮自平衡小车设计
最近辞职在家,想学点东西,看了视频教程,觉得枯燥无聊,想着是嵌入式方向的,怎么也要会一些项目吧,便准备开始着手做一些项目,就先从stm32的两轮自平衡小车

- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- amoled屏幕和oled区别
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105