

松下伺服电机参数设置有哪些?
松下伺服电机是指在伺服系统中控制机械元件运转的发动机。是一种补助马达间接变速装置。可使控制速度,位置精度非常准确。将电压信号转化为转矩和转速以驱动控制对象
好的,以下是松下伺服电机(通常指A5/A6/F7系列)参数设置的主要分类及关键项目的中文说明:
主要参数分类及关键设置项
-
基本功能设定参数:
- 控制模式选择: 最核心的设置 (
Pn000,Fn000等)。决定电机如何被控制:- 位置控制
- 速度控制
- 转矩控制
- 复合控制模式 (如位置/速度切换,速度/转矩切换等)
- 电子齿轮比: (
Pn202,Pn203,Pn204等)。定义指令脉冲数量与实际电机旋转量(或负载移动距离)之间的关系。计算公式通常是:负载移动单位 = (指令脉冲数 * Pn204) / (Pn202 * Pn203 * 编码器分辨率)
- 指令设定相关:
- 速度指令量程设定 (
Pn300) - 位置指令输入脉冲形式设定 (
Pn200,Pn201):方向+脉冲(CW/CCW),脉冲+方向(PULS/SIGN),双脉冲(正反脉冲)等。 - 速度/转矩指令输入形式:模拟量范围(-10V~+10V, 0~±10V等),通讯设定等。
- 速度指令量程设定 (
- 电机型号选择/初始化: (
Pn001)。在驱动器首次上电或更换电机后必须设置,以加载默认参数。
- 控制模式选择: 最核心的设置 (
-
增益调整参数 (影响响应性、稳定性、刚性):
- 速度环增益: (
Pn100/Pn103/Pn106)- 影响对速度指令的跟随性。值越大响应越快,但过高可能引起噪音或振动。
- 位置环增益: (
Pn102/Pn105/Pn108)- 影响对位置指令的跟随性和定位精度、刚性。值越大响应越快定位越准刚性越高,但过高易产生超调和振动。
- 积分时间常数: (
Pn101/Pn104/Pn107)。- 消除稳态误差(如持续负载下的速度偏差)。
- 陷波滤波器: (
Pn170系列等)。用于抑制特定频率的机械共振。 - 低通滤波器: (
Pn416等)。用于滤除高频干扰噪声。
- 速度环增益: (
-
保护功能设定参数:
- 过载保护设定: (
Pn006)- 设置允许电流的百分比和过载保护检出时间常数。保护电机和驱动器。
- 速度限制: (
Pn304)- 在速度/转矩模式下限制最高运行速度。
- 转矩限制: (
Pn402/Pn403/Pn405/Pn406)- 设置驱动器输出的最大扭矩(正转/反转,驱动/制动)。
- 过电压失速防止功能: (
Pn407)- 防止再生制动能量导致母线电压过高。常与再生电阻配合使用。
- 位置误差过大检出设定: (
Pn518)- 当位置偏差超过设定值时触发报警。
- 过载保护设定: (
-
运行模式相关参数:
- 加减速时间设定: (
Pn305/Pn306,Pn308/Pn309)- 设置速度模式下的加减速斜率(S曲线加减速时间)。
- 平滑设定: (
Pn311)- 使速度变化更平缓,减少冲击和振动。
- 零箝位功能: (
Pn307):控制接近0速度时的动作特性。 - 转矩滤波设定: (
Pn408):平滑转矩输出波形。
- 加减速时间设定: (
-
位置相关参数 (主要用于位置控制模式):
- 原点搜索设定: (
Pn81x,Pn82x,Pn83x)。- 搜索方式选择(DOG接近模式等)。
- 原点搜索速度(高速/低速)。
- DOG信号定义及逻辑。
- 软限位: (
Pn522,Pn523,Pn524)。在软件层面限制电机移动范围。 - 正/反向限位输入设定: (
Pn50x分配为LSP,LSN)。硬件限位。
- 原点搜索设定: (
-
输入/输出端口功能设定:
- DI输入信号分配: (
Pn50x系列)。- 定义外部输入端子(如
S-ON,P-CON,CLR,RESET,LSP,LSN,EMG,TLA,TLB,SON,ALM-RST等)的功能。
- 定义外部输入端子(如
- DO输出信号分配: (
Pn510,Pn511等)。- 定义输出端子(如
INP,ALM,RD,TLC,WARN,COIN,ZSP,TGON等)的状态和含义。
- 定义输出端子(如
- DI输入信号分配: (
-
通讯参数 (如Modbus, CANopen, EtherCAT等):
- 站号设定 (当通讯网路多站时)。
- 通讯速度设定。
- 通讯协议相关参数。
-
功能限制/锁定参数:
- 参数锁定: (
Pn00A)。- 防止未经授权的参数修改。通常需解锁后才能更改其他参数。
- 试运行功能禁止 (
Pn00B)。 - 通讯指令选择功能禁止 (
Pn00C)。
- 参数锁定: (
重要提示
- 务必查阅手册: 最重要的一点! 松下不同系列、不同型号的伺服驱动器参数定义、地址、范围和默认值都可能不同。必须参考对应驱动器(型号如MBDDTxxxxA)和电机(型号如MHMDxxxxxPxx)的完整技术手册。
- 使用工具: 强烈推荐 使用松下提供的专用软件 Panaterm 进行参数设置、调试和监控,比面板操作直观方便得多。
- 保存参数: 更改参数后,务必执行EEPROM写入操作将当前设置保存到驱动器内部非易失存储器中 (
Fn07或Fn08常作为写入命令)。 - 备份参数: 在完成调试后,使用软件导出/备份所有参数文件,方便更换驱动器或恢复设置。
- 调参方法:
- 初始化: 安装新系统后,先初始化参数 (
Pn001设电机型号) 。 - 基础设置: 设置必须项(控制模式、电子齿轮比、保护参数等)。
- 增益调整: 从默认增益开始试运行,观察系统响应(运行曲线图、声音、振动、发热)。微调速度环增益影响响应速度。调位置环增益影响稳定性和刚性。结合积分时间和滤波器消除超调、噪声和共振。善用实时自动增益调整 (
FnXXX) 和 一键增益调整 (Fn30X) 功能辅助。 - 逐步优化: 增益调整是一个需要耐心和实践的过程。微调,测试,再微调。
- 关注保护: 确保过流、过压、位置偏差保护等参数设置合理,防止损坏设备。
- 初始化: 安装新系统后,先初始化参数 (
通过仔细设置和调整这些参数,才能使松下伺服电机在特定应用中发挥最佳性能、稳定性和安全性。
如果你有具体的应用场景或驱动器型号,可以进一步提问。
松下伺服速度控制模式怎么设置
基本参数设置、速度控制模式选择、速度设定、加减速时间设置、速度反馈和监控等方面的内容。 一、基本参数设置 型号选择:首先,需要根据实际应用需求选
2024-06-12 10:30:09
台达ASDA系列伺服驱动器PLC的控制实例参数设置及PLC程序免费下载
台达ASDA系列伺服驱动器PLC的控制实例参数设置及PLC程序免费下载。
资料下载
![]() fengbaojun
2020-12-15 08:00:00
fengbaojun
2020-12-15 08:00:00
伺服驱动器的参数设置方法和故障排查技巧
电路过流会影响功率器件,因此伺服放大器设置了嵌位电路以限制输出转矩,转矩的限制可以通过模拟量或者参数设置进行调整。今天就分享下常见
2023-05-24 10:18:55
添加伺服轴的参数设置
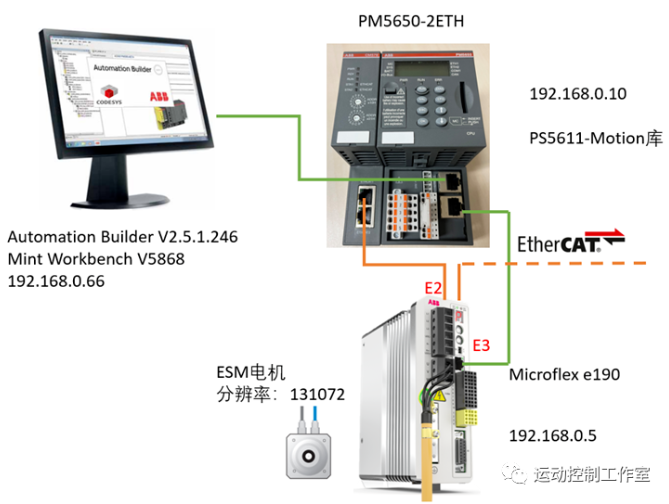
:对应EtherCAT主站(Master)的一些参数设置。 Axis01(Microflex e190): 对应驱动器的相关参数。 Axis01_axis: 可理解为挂在物理
2023-03-08 15:32:00
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- BLDC电机技术分析
- 复位电路的原理及作用
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 传感器常见类型有哪些?
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号