

各类单片机多机通信的原理及设计有哪些?
单片机多机通信是指两台以上的单片机组成的网络机构,可以通过串行通信方式实现数据交换和控制。多机通信的网络拓扑结构有星型、环型和主从式多种结构,其中以主从式结构应用较多。
更多
单片机多机通信是指多个单片机(或多个包含微控制器的设备)之间进行数据交换的技术。其核心在于解决通信介质共享、地址识别、冲突避免和数据传输可靠性的问题。以下从原理到设计进行详细介绍:
? 一、核心原理
- 共享通信介质:
- 所有参与通信的单片机共享同一物理传输通道(如同一条UART串口线?、同一条I2C总线、同一条CAN总线、共享的无线信道?等)。
- 地址标识:
- 每个通信节点(单片机或设备)必须拥有在该网络中唯一的地址(ID)。这是区分不同节点的关键?。
- 主从协调 / 对等协商:
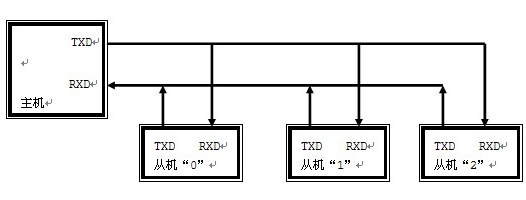
- 主从式(常见): 由一台单片机(主机)发起通信、控制总线、轮询从机(其他单片机)。从机只有在被主机寻址时才能响应。优点: 结构清晰,冲突少。缺点: 主机负担重,主机故障则系统瘫痪。
- 多主式(如CAN): 节点可以主动发起通信,但需要通过协议(如载波侦听多路访问/冲突避免 CSMA/CA、令牌传递等)来解决“谁可以现在说话”的冲突问题。优点: 可靠性高(无单点故障),响应快(无需等待轮询)。
- 数据传输协议:
- 定义数据的格式、含义和顺序(帧结构)。通常包含:
- 起始位/同步字符: 标识一帧数据的开始。
- 地址域: 目标节点的地址(和/或源节点地址)。
- 控制域/命令字: 指定操作类型(读、写、状态查询等)。
- 数据域: 实际要传输的信息。
- 校验域: 用于检测传输错误(如校验和、CRC)。
- 结束符: 标识一帧数据的结束。
- 定义数据的格式、含义和顺序(帧结构)。通常包含:
- 冲突检测与处理:
- 在非主从式或多主系统中,需要有机制检测总线是否空闲(载波侦听),以及当多个节点同时试图发送时如何解决冲突(冲突检测/避免 CD/CA)。
? 二、常见实现方式及设计要点
-
基于UART的多机通信(通常是主从式):
- 原理: 利用标准UART硬件,结合软件定义的地址识别协议。最常见的是9位数据模式。
- 主机发送的第一帧数据是地址帧,设置第9位(通常是一个特殊的停止位或标志位)为1(表示地址帧)。
- 从机初始化UART为:接收到第9位=1的帧时产生中断。
- 所有从机在中断中检查收到的地址字节是否匹配自己的地址。
- 匹配的从机:设置UART为接收第9位=0的数据帧,准备接收后续命令或数据,并向主机发送响应。
- 不匹配的从机:忽略后续所有第9位=0的帧(数据帧),直到下一个地址帧(第9位=1)。
- 设计要点:
- 电路设计: 常用TTL串口(短距离)或RS-485(长距离、差分、可挂载更多节点)。RS-485是主流选择,需要MAX485等收发器芯片,并注意终端电阻匹配。
- 协议设计:
- 定义清晰的地址分配方案(范围、唯一性)。
- 定义帧结构:起始字符、地址、命令/长度、数据、校验、结束符。
- 定义通信时序:主机轮询间隔、从机响应超时时间。
- 实现重发机制:应对校验失败或超时。
- 实现错误处理:数据冲突、校验错误、无响应等。
- 软件设计:
- 主机: 实现轮询状态机,处理发送请求、接收响应、超时重试。
- 从机: 实现地址识别状态机,根据命令执行操作并发送响应。需要严格遵循协议,只在被寻址时才占用总线发送。
- 原理: 利用标准UART硬件,结合软件定义的地址识别协议。最常见的是9位数据模式。
-
基于I2C总线的多机通信(主从式):
- 原理: I2C是内置了多主从控制能力的双线(SCL时钟、SDA数据)总线。通过硬件地址识别。
- 每个从机设备有一个固定的或部分可配置的7位/10位地址。
- 主机发起通信:发送Start + 目标从机地址(R/W)。
- 所有从机比较接收到的地址与自身地址。
- 地址匹配的从机:发送ACK应答信号。
- 主机随后发送命令或数据。
- 支持广播地址(向所有从机发送)。
- 设计要点:
- 电路设计: 严格按照I2C规范设计,上拉电阻(阻值根据总线速度和电容计算),注意总线负载电容限制。
- 地址规划: 选择地址冲突少的I2C器件,或使用带地址配置引脚(如A0/A1/A2)的芯片。使用10位地址扩展可用节点数。
- 协议设计: I2C协议本身定义了格式(Start, Address, R/W, Ack/Nack, Data, Stop)。应用层需定义:读/写哪个寄存器、数据格式、长数据传输机制(分页)。
- 软件设计: 利用MCU的硬件I2C外设驱动(效率高)或模拟I2C(灵活性高)。实现主机仲裁(多主机时)和从机响应逻辑。处理总线忙、无应答等错误。
- 原理: I2C是内置了多主从控制能力的双线(SCL时钟、SDA数据)总线。通过硬件地址识别。
-
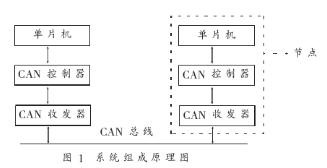
基于CAN总线的多机通信(多主式):
- 原理: CAN是专为汽车和工业环境设计的高可靠性多主通信总线。核心是基于优先级的非破坏性仲裁(CSMA/CA+CD)。
- 每个节点(单片机+CAN收发器)可以主动发送消息。
- 消息包含一个唯一的标识符(ID,11位/29位),ID越小优先级越高。
- 发送时同时侦听总线:如果自己发送的位与总线上的位不一致(说明有更高优先级节点在发送),则立即退出发送转为接收,获胜节点(最高优先级)无感知地完成发送。
- 数据帧包含:仲裁域(ID + RTR等)、控制域、数据域(0-8字节)、CRC域、ACK域等。
- 具有出色的错误检测、处理和容错能力。
- 设计要点:
- 电路设计: 必需CAN收发器(如SN65HVD230),严格的120欧姆终端电阻(总线两端各一个)。
- ID分配: 精心设计消息ID,确保功能重要/紧急的消息具有低ID(高优先级)。
- 协议设计(应用层): CAN定义了物理层、数据链路层。应用层协议(如CANopen, J1939, DeviceNet)需要自定义或采用标准,定义消息ID的含义、数据域格式、节点初始化、心跳、NMT(网络管理)。
- 软件设计: 复杂,通常依赖MCU自带的高集成度CAN控制器。需实现:
- 初始化: 配置位定时、波特率、过滤器。
- 发送/接收: 使用邮箱结构管理。
- 中断处理: 处理接收完成、发送完成、错误、总线关闭状态恢复。
- 高层协议栈: 实现自定义的或标准的应用层协议。
- 原理: CAN是专为汽车和工业环境设计的高可靠性多主通信总线。核心是基于优先级的非破坏性仲裁(CSMA/CA+CD)。
-
其他方式:
- SPI(环形或星形): 主从式。可通过片选(SS/CS)线扩展为多从机(星形),但从机间通信需经主机。理论上可构成环形网络(数据通过主机的MISO->下一个主机的MOSI串接),但较少用,实现复杂。
- 1-Wire: 主从式单总线。通过独特的64位ROM ID寻址。适合挂接温度传感器等简单器件。
- 自定义总线: 利用GPIO模拟通信时序(类似I2C但自定义规则),灵活性最高但实现复杂。
- 无线通信(WiFi, BLE, LoRa, Zigbee等): 需要无线模块。需解决寻址(通常基于IP或MAC地址/UUID)、组网(点对点、星型、Mesh)、冲突避免(底层协议通常处理了CSMA/CA)。
⚠ 三、关键设计考虑因素
- 通信距离与速率:
- TTL/UART: 短距离(<1米)。
- RS-485/UART:千米级。
- I2C: 短距离(板级),速率100K/400K/3.4M等。
- CAN:千米级(速率降低),典型40米@1Mbps。
- 无线:距离从几米(BLE)到数公里(LoRa),速率差异极大。
- 节点数量:
- UART/RS-485: 理论32/128,实际受驱动能力、偏置电阻限制。
- I2C:有限(地址冲突、总线电容),通常几个到十几个。
- CAN:理论多,主要受延迟和物理层限制,通常几十到上百。
- 无线:差异大,WiFi BLE几十,LoRa/Zigbee可达数百/千。
- 实时性与可靠性要求:
- 高实时性/高可靠:首选CAN。
- 中低要求:UART/RS-485、I2C。
- 成本与复杂度:
- UART/RS-485:成本低,协议简单(软件层面)。
- I2C:成本低(双线),协议中等。
- CAN:成本较高(芯片、开发),协议复杂(含硬件控制器和软件协议栈)。
- 无线:模块成本较高,协议栈复杂(尤其Mesh)。
- 拓扑结构:
- 总线型: UART/RS-485, I2C, CAN, 1-Wire。布线简单,共享介质。
- 星型: SPI(主-多个从的SS线)、WiFi AP。中心节点重要。
- 环型: 较少用。
- Mesh: 无线Mesh网络。去中心化,可靠性高,复杂度高。
- 抗干扰能力:
- 工业环境:优先CAN或RS-485(差分信号)。
- 一般环境:其他方式。
? 四、设计步骤概要
- 需求分析: 节点数、距离、速率、可靠性、成本、环境。
- 选择物理层和硬件: 根据需求选择UART/RS-485、I2C、CAN或无线模块及其收发器电路。
- 定义网络拓扑: 总线?星型?多点?
- 分配唯一地址: 为每个节点(设备)规划唯一的标识符(地址或ID)。
- 设计通信协议(应用层):
- 帧格式(起始、地址、命令、数据长度、数据、校验、结束)。
- 命令集(读、写、查询、控制、状态上报)。
- 通信流程(主从轮询规则、多主竞争仲裁机制)。
- 错误检测与恢复机制(校验和/CRC、超时重发、错误计数器)。
- (可选)节点管理功能(心跳包、加入/退出网络、初始化)。
- 软件实现:
- 配置MCU通信外设(UART/USART, I2C, CAN控制器)。
- 实现硬件层驱动(初始化、收发、中断服务程序)。
- 实现应用层协议解析器、状态机(处理发送请求、解析接收帧、生成响应)。
- 实现错误处理、超时管理、流控制。
- 编写主控制逻辑(主机角色)或任务响应逻辑(从机角色)。
- 调试与测试:
- 单节点测试:基本功能。
- 双节点测试:点对点通信。
- 多节点测试:加入多个节点,测试冲突、延迟、可靠性。
- 环境测试:不同干扰条件下(电平波动、噪声)测试稳定性。
? 总结
多机通信的关键在于共享介质管理、节点寻址机制和可靠数据传输。选择哪种方式取决于具体的应用场景(距离、速度、节点数、成本、抗干扰性、拓扑)。理解所选方式的物理层特性和通信原理至关重要,在此基础上精心设计应用层协议并可靠实现软件逻辑,才能构建稳定高效的单片机多机通信系统。对于复杂系统,采用成熟的工业标准总线(如RS-485配合Modbus协议、CAN/CANopen)是提高可靠性和效率的捷径。???
NY8A050D单片机,AD单片机,九齐代理

1970-01-01 08:00:00 至 1970-01-01 08:00:00
如何使用MSP430单片机进行多机串口通信的设计
MSP430单片机以其显著的低功耗特性在工业控制等领域得到了广泛应用。本文讨论了采用MSP430单片机构建串口多
资料下载
佚名
2019-03-07 18:06:53
7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- BLDC电机技术分析
- 复位电路的原理及作用
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 传感器常见类型有哪些?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号