

伺服驱动器的作用与原理
目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。
更多
好的,我们用中文来解释伺服驱动器的作用与原理。
伺服驱动器的作用
简单来说,伺服驱动器是伺服系统的“大脑”和“肌肉”,它接收来自上位控制器(如PLC、运动控制卡)的指令信号(通常是期望的位置、速度或转矩),并据此精确地控制伺服电机运转,实现精准、快速、稳定的运动控制。其核心作用体现在:
-
指令解析与执行:
- 接收并解析上位控制器发送的数字或模拟指令信号(如:脉冲+方向信号、模拟量电压信号、总线通信报文等)。
- 理解指令所期望的电机运动状态(目标位置、目标速度、目标转矩)。
-
闭环控制: 这是伺服驱动器最核心的作用和区别于普通变频器的关键。
- 反馈采集: 通过连接在伺服电机轴上的编码器(或旋转变压器等位置/速度传感器),实时获取电机的实际位置和实际速度。
- 误差计算: 将获取到的实际值(位置、速度、有时还有电流/转矩)与指令值进行比较,计算出偏差(误差)。
- 控制运算: 根据这个偏差,运用先进的控制算法(最常用的是经典的PID控制——比例、积分、微分控制,或更复杂的算法)进行计算,决定如何调整电机的驱动信号来修正这个偏差。
-
功率放大:
- 将经过控制算法计算出的低功率、高精度的控制信号,放大转换成足以驱动伺服电机的高功率电流。
- 主要使用脉冲宽度调制(PWM)技术,通过大功率半导体器件(如IGBT或MOSFET模块)以极高频率开关,调节供给电机绕组电流的大小、波形和相位。
-
电机励磁:
- 按照正确的相位顺序(UVW三相),将放大后的三相电流(或直流电流,对于直流伺服电机)提供给伺服电机的定子绕组。
- 精确控制三相电流产生旋转磁场,驱动电机转子同步旋转。
-
状态监控与保护:
- 持续监控系统的关键状态:电压、电流、电机温度、驱动器温度、编码器状态、位置误差是否过大等。
- 在检测到异常(过压、欠压、过流、过热、超程、编码器故障等)时,立刻停止功率输出并发出报警信号,保护电机和驱动器本身不被损坏。
- 提供状态信息回馈给上位控制器或用户界面。
-
通信与参数设置:
- 提供通信接口(RS232/485、CANopen、EtherCAT、ProfiNet等)与上位控制器或PC软件进行数据交换(发送状态、接收指令、设置参数)。
- 允许用户或工程师通过操作面板或软件设置大量参数(如增益PID参数、控制模式、转矩限制、速度限制、位置限制等),以优化系统性能和适应不同应用。
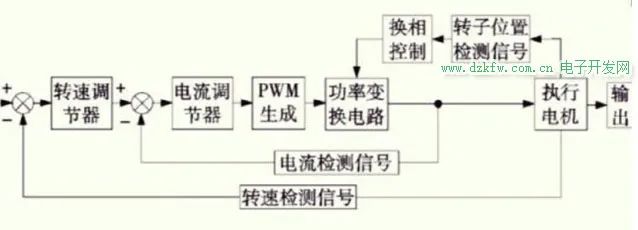
伺服驱动器的工作原理
伺服驱动器的工作原理本质上是一个高速、高精度的闭环负反馈控制系统。其工作流程可以简述如下:
- 指令输入: 上位控制器向伺服驱动器发送运动指令信号(如脉冲数量决定目标位置,脉冲频率决定速度)。
- 反馈检测: 伺服电机尾部的编码器(或其他传感器)实时检测电机转子的实际位置和实际速度(有时通过计算得出电流/转矩),并将此反馈信号送回驱动器。
- 误差产生: 驱动器内部的数字信号处理器(DSP)或专用控制芯片(ASIC)将收到的指令值(目标值)与反馈值(实际值)进行比较。
- 控制计算(PID运算):
- 比例(P): 误差值乘以一个比例增益系数,提供快速响应。
- 积分(I): 对历史误差进行积分,乘以积分增益系数,消除静态误差(精度)。
- 微分(D): 对当前误差的变化率(斜率)进行微分,乘以微分增益系数,抑制振荡(提高稳定性)。
- 将这三部分计算结果相加,形成总的控制输出量(通常是电压指令信号)。
- 功率转换:
- 控制输出量传递给PWM信号发生器。
- PWM发生器根据控制信号的大小,产生对应脉宽(占空比)的高频PWM信号(例如几kHz到几十kHz)。
- 这个PWM信号驱动功率放大电路(IGBT/MOSFET)桥臂的开关动作。
- 电源电路(通常是将交流输入整流成直流)为功率放大电路提供高压直流母排电压。
- 电机驱动:
- 功率放大电路将直流母排电压“切割”成与PWM信号对应的脉动电压,施加在伺服电机的定子绕组(U, V, W)上。
- 精确控制三相PWM的相位关系,在电机内部产生受控的旋转磁场。
- 流过电机绕组的电流产生电磁转矩,驱动转子旋转。
- 闭环调节:
- 转子旋转后,编码器反馈回新的实际位置和速度值。
- 驱动器再次将新实际值与目标值比较,计算新的误差,并进行下一轮PID运算,调整PWM输出。
- 这个过程以极高的速度(几千次到几万次每秒)不断循环,形成一个负反馈闭环。
- 核心目标: 通过持续的微小调整,使实际值(位置/速度)尽可能快速地、精确地、稳定地跟踪上目标值,并消除跟踪误差。
总结来说:
- 作用: 伺服驱动器是接收指令、解析意图、控制电机、实现精密运动的智能中枢。
- 原理: 核心在于“闭环反馈控制”(PID等算法) + “高精度功率放大”(PWM + IGBT),通过不断比较目标与现状并精确调整输出,让电机精准地执行指令。没有伺服驱动器的高性能闭环控制,单靠伺服电机本身无法实现高精度、高动态响应的运动性能。两者共同构成了强大的伺服系统。
- 本质区别: 与开环控制(如普通步进系统)和简单的调速控制(如普通变频器V/F控制)相比,伺服驱动器的闭环控制是其实现高性能运动控制的关键。
7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- BLDC电机技术分析
- 复位电路的原理及作用
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 传感器常见类型有哪些?
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号