

步进电机驱动器怎么接线?
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
更多
步进电机驱动器的接线是关键环节,接错轻则无法工作,重则损坏电机、驱动器或控制器。接线前务必查阅并严格遵守你的具体驱动器型号的使用说明书。
以下是接线的一般步骤和原则,适用于市面上绝大多数步进电机驱动器(如 A4988, DRV8825, TB6600, DM542 等):
一、识别接线端子/接口
驱动器通常有以下几组关键连接点:
-
电源输入 (Power Supply):
- 标记通常为:
+VCC/V+,GND/V-,+/-(对于单电源),有时分VMOT(电机驱动电源) 和VDD(逻辑电源)。 - 注意电压范围: 确保电源电压在驱动器允许的范围内(查看手册)。连接前确认极性! 正极接
+VCC/V+/VMOT+,负极接GND/V-/VMOT-。 - 电流要求: 电源需能提供足够电流以满足电机需求(通常比电机额定电流稍大)。
- 电容: 很多驱动器要求在电源正负极间并联一个大容量的电解电容(如 470uF 或更大,电压高于电源电压),靠近驱动器安装,以提供瞬间大电流并吸收反电动势。务必注意电容极性!
- 标记通常为:
-
电机输出 (Motor Outputs):
- 标记通常为:
A+,A-,B+,B-(最常见的四线双极性步进电机)。 - 关键: 你需要知道你的步进电机是几根线以及是什么类型(双极性/单极性)。
- 双极性四线电机 (最常见): 找到电机的两根线圈:用万用表测量,电阻很小(通常几欧姆)的两根线属于同一组线圈(如 A 线圈),另外两根属于另一组线圈(如 B 线圈)。将电机的 A 线圈两根线分别接到驱动器的
A+和A-;B 线圈两根线分别接到B+和B-。 - 双极性六线电机: 这种电机有两组线圈,每组有三根线(中心抽头)。用作双极性时,我们只使用每组线圈的两端线(颜色通常对应),忽略中心抽头(或悬空不接)。接线方式同四线电机:将第一组线圈的两端接
A+,A-;第二组线圈的两端接B+,B-。 - 双极性八线电机: 有四组两两相串的线圈(或看作两个独立线圈,每个线圈有中心抽头)。可以用作串联(力矩大,高速性能稍差)或并联(电流大,高速性能好)。驱动器需要支持相应的电流。
- 串联: 第一组两线圈串联的两端接
A+,A-;第二组两线圈串联的两端接B+,B-。 - 并联: 第一组两线圈并联的两组端点分别接
A+,A-;第二组两线圈并联的两组端点分别接B+,B-。
- 串联: 第一组两线圈串联的两端接
- 单极性电机 (通常 5/6 线): 这种电机现在较少见,很多现代驱动器也不直接支持。它有公共线(Center Tap),单极性驱动器会用到公共线。双极性驱动器也可以驱动,但需要将公共线悬空或剪掉,只接每对引线中的一根(实际还是接两端线)。
- 标记通常为:
-
控制信号输入 (Control Signals):
- 这是连接微控制器(如 Arduino, Raspberry Pi, CNC 控制器)的地方。最重要的两根是:
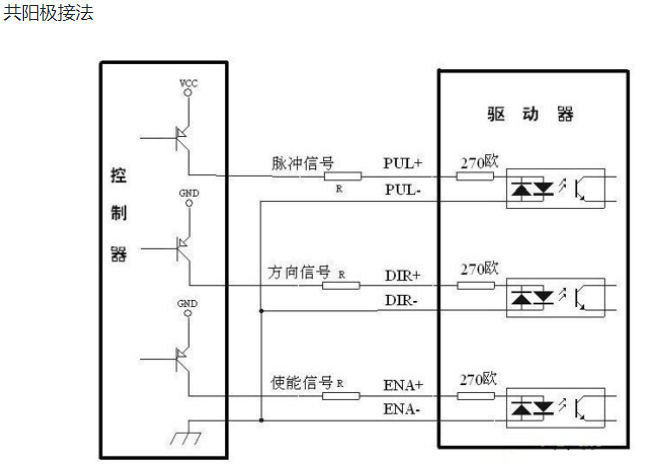
PUL+/PUL-或STEP/STEP-:步进脉冲信号输入。每个上升沿(或根据驱动器设置)使电机前进一步(或半步、细分步)。+脚通常需要接一个高电平(如 3.3V, 5V 或 24V,看驱动器逻辑电压要求),-脚接控制器的脉冲输出引脚。DIR+/DIR-或DIR/DIR-:方向控制信号输入。高电平或低电平(取决于驱动器)控制电机旋转方向。+脚通常需要接一个高电平(如 3.3V, 5V 或 24V),-脚接控制器的方向输出引脚。
- 非常重要:
PUL-,DIR-以及控制器的GND必须共地! 即将驱动器的GND(逻辑地) 与控制器的GND连接起来。否则信号无法识别! - 其他常见可选信号:
ENA+/ENA-或ENABLE/ENABLE-:使能信号。通常高电平或断开为启用电机(驱动器输出电流到电机),低电平为使能失效(电机处于自由状态或低功耗模式)。根据需要连接。MS1,MS2,MS3:微步细分配置引脚(如果驱动器支持)。通过连接到VDD(逻辑高) 或GND(逻辑低) 来选择不同的步进细分模式。可以直接用跳线帽连接到驱动板上的5V(通常指VDD) 和GND。RESET/SLEEP:复位或睡眠引脚。通常低电平有效,使驱动器复位进入特定状态或睡眠节能模式。
- 这是连接微控制器(如 Arduino, Raspberry Pi, CNC 控制器)的地方。最重要的两根是:
二、接线示例 (以常见的 +/- 标记方式驱动器为例,连接微控制器)
- 准备电源:
- 正极 ---> 驱动器的
+VCC(或VMOT+/+) - 负极 ---> 驱动器的
GND(或VMOT-/-) - 在
+VCC和GND之间,紧贴驱动器并联一个合适的大电解电容(注意极性)。
- 正极 ---> 驱动器的
- 连接电机:
- 电机线圈A+ ---> 驱动器
A+ - 电机线圈A- ---> 驱动器
A- - 电机线圈B+ ---> 驱动器
B+ - 电机线圈B- ---> 驱动器
B-
- 电机线圈A+ ---> 驱动器
- 连接微控制器:
- 关键共地: 驱动器的
GND---> 微控制器的GND PUL+---> 微控制器的5V或3.3V(视驱动器逻辑要求,通常是5V)PUL----> 微控制器的脉冲输出引脚 (如 ArduinoDigital Pin 2)DIR+---> 微控制器的5V或3.3V(同PUL+)DIR----> 微控制器的方向控制引脚 (如 ArduinoDigital Pin 3)- (可选)
ENA+--->5V或3.3V(保持启用),或连接到微控制器的一个数字引脚来控制使能。 - (可选)
MS1,MS2,MS3---> 根据需要连接到驱动板提供的5V(高电平) 或GND(低电平) 引脚,配置细分。
- 关键共地: 驱动器的
三、重要注意事项和安全警告
- 断电操作: 接线或修改线路时务必先断开所有电源(主电源和控制电源)!
- 仔细阅读手册: 你的驱动器的引脚定义、电压范围、电流设定方式等可能与上述通用描述略有不同。说明书是最权威的依据!
- 电流调整: 几乎所有驱动器(除了那种焊死电流的模块)都需要正确设置输出电流(与电机额定电流匹配或略小)。这通常通过调整板载电位器(如 A4988)或拨码开关/DIP 开关(如 TB6600)来实现。设置过低会导致丢步、无力;设置过高会导致电机过热、驱动器过热保护甚至烧毁。首次上电前或更换电机后必须检查/设置电流! (具体方法看手册)
- 微步细分: 如果使用微步细分(
MS1/MS2/MS3),确保控制器发送的脉冲频率能对应更高的分辨率(否则电机实际转速可能会变慢)。 - 接线牢固: 使用合适的线缆和连接器,确保连接牢固可靠,避免松动虚接,尤其大电流线路。
- 避免短路: 仔细检查所有接线,确保没有裸露的金属部分意外接触造成短路(尤其是电源正负极、
A+/A-之间、B+/B-之间)。 - 散热: 驱动器工作时会发热,确保它安装在通风良好的地方,需要时加装散热片或风扇。
- 首次上电测试:
- 连接好线路,再次确认无误。
- 先断开电机与驱动器的连接(这样即使接错也不会烧电机)。
- 接通控制电源(逻辑电源),驱动器指示灯应亮起(如果有的话)。
- 接通主电源(电机驱动电源)。观察驱动器状态灯(如果有的话)。没有冒烟、异常发热、异味。
- 用控制器软件发送少量脉冲指令,观察驱动器上的脉冲指示灯(如果有时序灯)是否闪烁。
- 然后才能连接电机进行测试(最好先不带负载,用手感觉电机是否转动或抖动)。转动方向不对可交换
A+/A-或B+/B-(但注意每次只能交换一组线圈的两根线)。
总结步骤
- 读手册! 确认你的驱动器的具体接口定义、电压、电流设置方法。
- 识别电机线序: 用万用表测量,找出线圈对应关系。
- 连接电源: 注意极性、电压范围、并联大电容。
- 连接电机:
A+,A-,B+,B-对应接好。 - 连接控制器: 保证
GND共地是关键!PUL+,PUL-,DIR+,DIR-按需要连接。可选信号视情况。 - 设置驱动电流! (重要)
- 断电检查所有接线! 避免短路和接触不良。
- 安全测试: 先断开电机上电,再连电机空载测试。
记住,安全第一,细心第二。严格按照手册操作是避免硬件损坏的根本方法。如果你使用的驱动器型号明确,我可以尝试提供更具体的参考信息(但最终还是以你的手册为准)。
7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- BLDC电机技术分析
- 复位电路的原理及作用
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 传感器常见类型有哪些?
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号