

遥控直升机原理
遥控直升机的飞行原理基于空气动力学和精确的控制系统,主要涉及以下几个核心部分:
一、飞行基本原理
-
升力产生(主旋翼)
- 主旋翼旋转时,桨叶通过特殊翼型切割空气,上方气流速度加快、压强降低,下方形成高压区,产生向上的升力(伯努利原理)。
- 变距控制:通过调整桨叶的攻角(桨叶与气流的夹角)改变升力大小。攻角越大,升力越大。
-
反扭矩与尾桨
- 主旋翼旋转时会产生反向扭矩,使机身反向旋转(牛顿第三定律)。
- 尾桨作用:通过改变尾桨推力大小,抵消反扭矩并控制机头方向(偏航)。
二、控制系统组成
遥控直升机通常有 4-6 个控制通道,对应不同动作:
-
升降(Pitch)
- 原理:增大主旋翼桨叶攻角 → 升力增加 → 爬升;减小攻角 → 下降。
- 执行:舵机拉动十字盘倾斜,使所有桨叶攻角同步变化。
-
前后/左右移动(Cyclic Control)
- 原理:倾斜主旋翼旋转平面,使升力分力推动直升机平移。
- 执行:舵机驱动十字盘前后/左右倾斜,使桨叶在特定位置周期性改变攻角(如前进时,旋转到后方的桨叶攻角增大)。
-
偏航(Yaw)
- 原理:改变尾桨推力大小,调整反扭矩平衡。
- 执行:尾舵机控制尾桨螺距(攻角),推力增大时机头左转,反之右转。
-
油门(Throttle)
- 原理:调节电机/发动机转速,控制主旋翼转速。
- 协同控制:常与变距联动(如爬升时需同时增加油门和攻角)。
三、遥控信号传输
-
发射端(遥控器)
- 摇杆/拨杆动作 → 编码为数字信号 → 通过 2.4GHz 无线电波发射。
-
接收端(直升机)
- 接收机解码信号 → 输出指令至各舵机及电调(ESC)。
-
舵机响应
- 舵机将电信号转为机械运动(如拉动十字盘或尾桨变距杆)。
四、动力系统
-
电动机(主流方案)
- 无刷电机:效率高、寿命长,由电子调速器(ESC)控制转速。
- 锂电池供电:高倍率(如 25C)锂聚合物电池提供瞬时大电流。
-
机械传动
- 主电机通过齿轮/皮带驱动主旋翼轴。
- 尾桨通常由独立电机或通过传动轴/皮带驱动。
五、稳定与辅助系统
-
陀螺仪(Gyro)
- 实时检测机身偏航角速度 → 自动调整尾桨推力,抵消外界扰动(如风)。
- 现代三轴陀螺仪可辅助稳定横滚、俯仰姿态。
-
飞控系统(高级机型)
- 集成加速度计、气压计等传感器,实现:
- 自稳模式:自动抵抗风扰,保持悬停。
- 定高模式:通过调节油门维持高度。
- GPS定位:定点悬停、自动返航。
- 集成加速度计、气压计等传感器,实现:
六、关键机械结构
- 十字盘(Swashplate):
分上下两层,舵机驱动其倾斜(平移控制)或升降(高度控制),将动作传递至主旋翼桨叶。 - 相位器(Phase Lag Compensator):
确保桨叶攻角变化与十字盘动作同步(桨叶需旋转至特定角度才响应变距)。
总结:操作流程示例
- 起飞:增大油门(主旋翼加速)→ 增大桨距(升力增加)→ 离地。
- 前进:十字盘前倾 → 主旋翼旋转至后侧时攻角增大 → 升力前倾分量推动前行。
- 左转:尾桨推力减小 → 反扭矩使机头左偏。
- 悬停:油门+桨距维持高度,陀螺仪微调姿态抵消晃动。
现代遥控直升机通过电子系统简化了机械复杂度(如直驱尾桨电机),但核心原理仍依赖对主旋翼升力和扭矩的精确控制。
无人直升机的设计和组装资料
是比较简单的一种。 集成的无人驾驶直升机只是用于学术研究。军用或商用无人机更为复杂。在了解无人飞行器的基础上,我们设计并组装一个简单的原型无人直升机。先进的无线电
俄罗斯开始对卡-52攻击直升机的最新升级版卡-52M原型机进行测试
俄罗斯直升机集团在2月10日发布的一份声明中说,将于2022年开始向俄军部队交付卡-52M直升机。“目前卡-52M直升机的飞行测试正在卡莫夫国家
2021-02-20 09:53:44
基于飞行实测的直升机操纵与载荷特性研究综述
为了解决当前计算方法与技术手段无法准确预估直升机操纵与载荷特性问题,利用飞行测试的手段,在某型直升机上开展了操纵与载荷特性硏究工作,获取了真实飞行环境下直升机
资料下载
佚名
2021-04-30 11:26:34
直升机机体振动水平评估研究综述
为了评估直升机杋体振动水平,开展了桨毂交变载荷预估工作,以某型直升机为算例,采用综合气弹分析方法对其典型飞行状态下进行桨毂振动载荷计算;通过模块化方法建立某型
资料下载
佚名
2021-04-15 11:08:09
舰载无人直升机的现状和应用展望的详细资料说明
以提升海军战斗力的需求为牵引,对世界各国海军典型舰载无人直升机的发展现状进行了归纳,通过分析舰载无人直升机的需求,结合海军军事建设的特点和未来海面战场需要给出了其作战应用展望。
资料下载
![]() 梧桐爸
2019-07-17 08:00:00
梧桐爸
2019-07-17 08:00:00
中国首款高原无人直升机创造了国产无人直升机起降高度新纪录
9月27日,中国首款高原无人直升机AR-500C首次在世界上海拔最高的民用机场成功试飞,创造了国产无人直升机起降高度新纪录。
2020-09-28 14:05:43
H160直升机是同类型直升机中最安静且在油耗方面最环保的直升机之一
空中客车直升机多用途双发H160直升机获得了欧洲航空安全局(EASA)的型号合格证,标志着该项目正式进入下一阶段。空中客车直升机计划在今年下半年
2020-07-22 08:26:40
我国武装直升机的历代发展进程介绍
武装直升机配有机载武器或火控系统,是一种名副其实的攻击性武器装备,是直升机家族中的战斗机,被誉为“超低空空中杀手”、“坦克终结者”和“树梢高度的
2019-12-11 14:00:51
VxWorks操作系统在无人直升机控制系统有什么应用?
世界上第一架无人机,无人机已经经历了无人靶机、预编程序控制无人侦察机、指令遥控无人侦察机、复合控制和自主飞行多用途无人机的发展过程,现今无人
采用MMA7260QT和MC9S08QG8无线遥控直升机飞行姿态传感器电路的设计
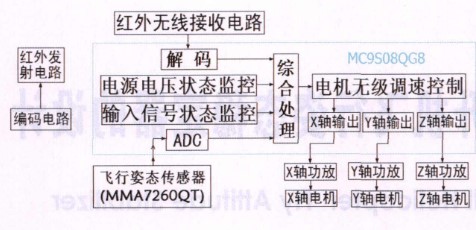
本项目设计的是无线遥控直升机接收控制电路。本设计采用飞思卡尔公司生产的MMA7260QT低量程三轴向加速度传感器和低功耗的MC9S08QG8 微控制器,并配合极少量的外围器件。该电路能接收无线
2019-11-06 07:54:00
直升机虚拟仪表分立仪表DLL设计
作者:石春虎,曲红星,陈雷计算机辅助训练(CBT,ComputerBasedTraining)系统是在世界航空业广泛应用的一种培训方式。直升机CBT系统主要用于实现直升机飞行员各项模拟训练,包括通电
青岛空中客车直升机公司成功完成了H135直升机的首次验收飞行
“青岛首次H135验收飞行的成功印证了空中客车直升机青岛与军民航管制部门建立的紧密合作关系,为青岛项目的成功奠定了坚实基础。“空中客车直升机青岛有限公司总经理安托万.安伯格表示。
2019-05-21 15:58:49
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- dtmb信号覆盖城市查询
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105