

无人机遥感技术的详述及电路设计原理的介绍
无人机遥感技术利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通讯技术、GPS差分定位技术和遥感应用技术,能够实现自动化、智能化。
以下是关于无人机遥感技术详解及电路设计原理的中文介绍,内容分为两部分,便于清晰理解:
一、无人机遥感技术详解
无人机遥感(UAV Remote Sensing)是将传感器搭载于无人机平台,通过空中数据采集实现地表信息监测的技术。其核心包括平台系统、传感器、数据处理三部分。
1. 核心技术组成
| 组件 | 功能与类型 |
|---|---|
| 无人机平台 | - 类型:多旋翼(灵活起降)、固定翼(长航时)、垂直起降(VTOL)。 - 要求:稳定性、抗风能力、续航(一般30-90分钟)。 |
| 传感器系统 | - 可见光相机:高分辨率RGB成像(用于测绘、植被监测)。 - 多光谱/高光谱相机:捕捉植被反射光谱(农业、环境监测)。 - 热红外相机:探测地表温度(火灾预警、电力巡检)。 - 激光雷达(LiDAR):生成三维点云(地形建模、林业调查)。 |
| 定位系统 | - GNSS(GPS/北斗):定位精度达厘米级(RTK/PPK技术)。 - IMU(惯性测量单元):补偿飞行姿态扰动。 |
| 数据传输系统 | - 图传:实时传输影像(2.4/5.8GHz频段)。 - 数传:控制指令与遥测数据(LoRa、4G/5G备份)。 |
| 数据处理软件 | - Pix4D/Agisoft Metashape:生成正射影像、DSM、点云。 - ENVI/ArcGIS:光谱分析、分类解译。 |
2. 工作流程
- 任务规划:设定航高(50-200米)、重叠率(70%以上)、航线路径。
- 数据采集:自动驾驶模式下自动拍摄,同步记录POS数据(位置+姿态)。
- 数据预处理:
- 几何校正(消除畸变)
- 辐射校正(光照补偿)
- 点云配准(LiDAR数据)
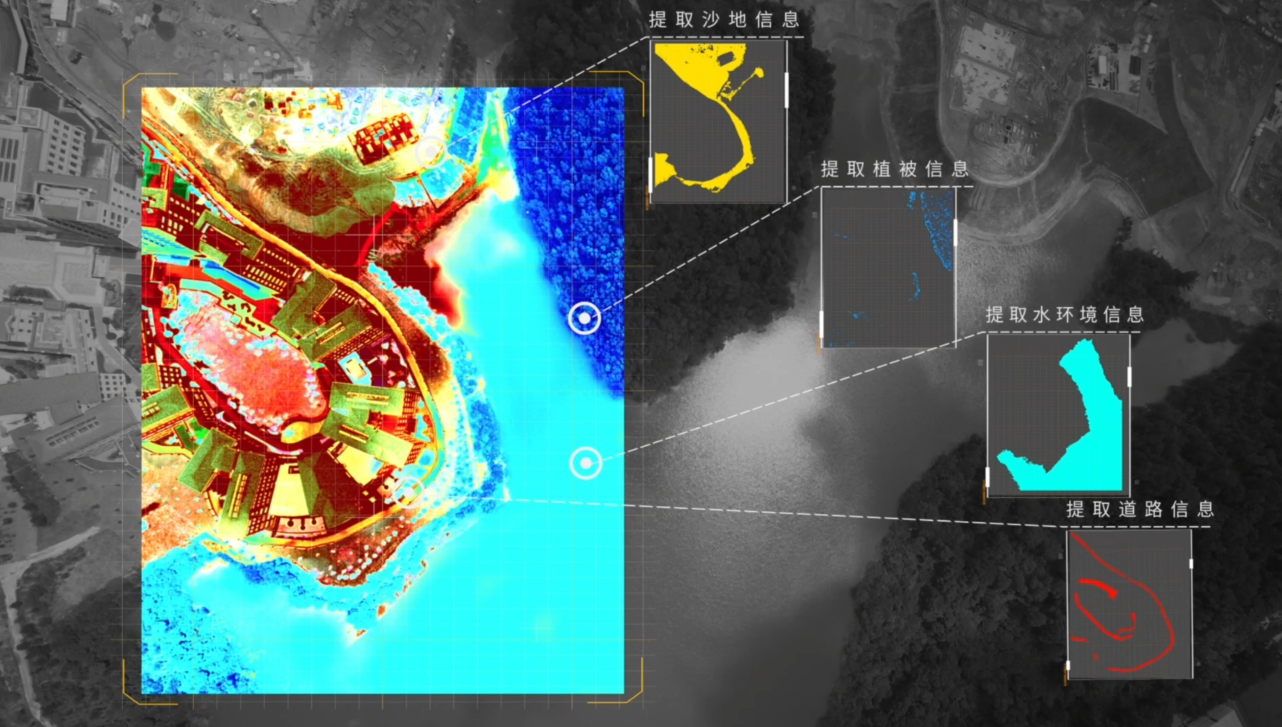
- 信息提取:
- NDVI指数:植被健康度分析
- 高程模型:洪涝灾害评估
- 目标识别:建筑物变化检测
3. 应用场景
- 精准农业:作物病虫害监测、灌溉优化
- 灾害应急:地震损毁评估、洪水淹没分析
- 环境保护:非法排污监测、森林碳储量测算
- 智慧城市:三维建模、违章建筑识别
二、无人机电路设计原理
电路系统是无人机的“神经中枢”,核心包括飞控、动力、通信、电源四大模块。
1. 核心电路模块
| 模块 | 设计要点 |
|---|---|
| 飞控系统 | - 主控芯片:STM32F7/H7系列(ARM Cortex-M7,400MHz+) - 传感器接口: - IMU(MPU6050/ICM-20602,I²C/SPI通信) - 磁力计(HMC5883L) - 气压计(MS5611) - 算法实现:PID控制、卡尔曼滤波(姿态解算) |
| 动力系统 | - 电调(ESC):BLDC无刷电机驱动(PWM频率8-16kHz) - 电机:KV值匹配电池电压(如4S电池选800KV电机) - 功率电路:MOSFET桥式驱动(IRF3708),电流检测(ACS712) |
| 通信系统 | - 遥控链路: - 2.4GHz RF(NRF24L01+,延迟<10ms) - 数传模块(SiK Radio,433MHz,最大10km) - 图传系统:5.8GHz模拟(ADV6323编码)或数字图传(H.265压缩) |
| 电源管理 | - 电池:锂聚合物(LiPo)3S~6S(11.1V~22.2V) - 稳压电路: - 12V→5V:Buck降压(LM2596) - 5V→3.3V:LDO稳压(AMS1117) - 保护电路:过流保护(自恢复保险丝)、电压监控(TL431基准) |
2. 关键电路设计示例
飞控传感器电路(简化)
+---------------------+ +---------------------+
| MPU6050 (IMU) | | MS5611 (气压计) |
| SDA → STM32 PB7 | | SCL → STM32 PB8 |
| SCL → STM32 PB6 | | SDA → STM32 PB9 |
| VCC → 3.3V LDO | | VCC → 3.3V LDO |
+---------------------+ +---------------------+电调驱动电路原理
STM32 PWM输出 → 光耦隔离(TLP281) → MOSFET驱动(IR2104) → 三相桥(6×IRF3708) → 无刷电机3. 安全设计原则
- 抗干扰:
- 电源入口加π型滤波(电容+磁珠)
- 传感器信号线屏蔽双绞
- 冗余设计:
- 双IMU(主备切换)
- 双电池并联供电
- 散热处理:
- MOSFET加散热片(热阻<1.5°C/W)
- 高温关机保护(NTC测温)
总结
- 无人机遥感:以高时空分辨率数据采集为核心,依赖传感器融合与智能算法。
- 电路设计:需平衡功耗、可靠性、EMC性能,重点在飞控实时性、动力效率、通信稳定性。
以上内容涵盖技术框架与工程实现要点,可根据具体应用场景深化细节设计(如农业无人机需优化多光谱传感器电路,巡检无人机需强化图传链路)。
无人机多光谱遥感在水生植被精细分类中的应用
随着遥感技术的快速发展,无人机多光谱遥感凭借其高分辨率、灵活部署和低成本等优势,已成为水生植被监测的重要工具。中达瑞和系统梳理了
2025-10-27 10:40:48
基于无人机遥感的作物长势监测研究进展

无人机遥感技术通过对作物生长过程中的环境因素、物理指标和生化参数等进行实时或定期监测,来评估和预测作物的生长情况和生产潜力,指导农业生产和管理决策,不仅优化了作物生长环境和生产方式,且提高了作物
2024-07-12 14:14:12
无人机遥感技术在农业病虫害监测中的应用研究

在农业领域,病虫害是使得作物产量减少的关键因素之一。传统的监测方法不仅操作繁琐且效率低下,因此急需寻找一种高效、快速而又不会对农作物造成破坏的监测手段。在这一挑战面前,无人机遥感技术的涌现为解决农业病虫害监测问题提供
2024-04-25 15:13:33
遥感技术在药用植物资源中的应用
,目前遥感技术在药用植物中应用的种类偏少,应用范围较小。无人机遥感适用于分散、不规则局部区域药用植物的识别与动态监测,可以较好地补充卫星
2022-05-24 11:00:42
无人机遥感技术对高粱生长状态的监测研究
在无人机遥感技术对高粱生长状态的监测研究方面还未有大量研究。本文以南通市农业研究实验基地种植的高粱为研究对象,选取可反应农作物长势的叶面积指数(LAI)、植被覆盖度(FVC)为高粱生长参数的指标,通过
2022-04-14 10:52:40
无人机低空遥感技术在农作物监测和诊断与评估中的应用研究
重点任务之一为,夯实数字农业基础,完善自然资源遥感监测“一张图”和综合监管平台,对永久基本农田实行动态监测。在此背景下, 本文主要介绍精准农业技术
2020-09-25 11:28:41
无人机遥感技术国内外的发展有什么异同
无人机遥感系统由于具有机动、快速、经济等优势,已经成为世界各国争相研究的热点课题,现已逐步从研究开发发展到实际应用阶段,成为未来的主要航空遥感技术
2019-09-26 15:39:56
无人机类型之植保无人机,带你了解什么是植保无人机?
的出现的确改变了我国的农药防治现状,如今国内的植保无人机在由于其卓越的性能,受到了各级***及企业的一直看好,所研发的机型也逐渐丰富、应用范围变广、推广速度加快、技术研究越来越深入。那么到底什么是植保
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- BLDC电机技术分析
- 复位电路的原理及作用
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 传感器常见类型有哪些?
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号