

STM32单片机控制电机运行时间
STM32单片机控制电机运行时间
好的,用STM32单片机精确控制电机运行时间,核心思路是利用STM32强大的定时器资源或者系统时钟来实现计时,并根据设定时间控制电机驱动信号的通断。以下是详细的中文实现方案:
核心原理:
- 计时: 使用STM32内部的定时器或系统时钟来计算电机已经运行的时间。
- 比较: 将计数值(时间)与预设的目标运行时间值进行比较。
- 控制: 当计数值达到目标值时,关闭控制电机的输出信号(如PWM、使能引脚、继电器控制信号等),使电机停止。
实现方法:
主要依靠STM32的定时器外设:
-
硬件定时器实现:
- 基本步骤:
- 选择并初始化定时器: 选择一个合适的通用定时器或高级定时器(如TIM1, TIM2, TIM3, TIM4, TIM8等)。
- 配置时钟源和预分频器: 设置定时器的时钟源(通常为系统主频或其分频值),通过预分频器
Prescaler将输入时钟分频,得到基础的计数频率。 - 设置重装载值: 设定定时器的自动重装载寄存器
AutoReload Register。这决定了定时器从0计数到ARR值后溢出一次的时间(或从ARR值递减到0)。这个溢出时间就是定时器的一个“完整周期”。 - 开启更新中断: 使能定时器的更新中断。
- 启动定时器: 调用
HAL_TIM_Base_Start_IT()(HAL库)或TIM_Cmd(TIMx, ENABLE);(标准库)启动定时器及其中断。
- 时间计算与控制逻辑:
- 在定时器的更新中断服务程序(
TIMx_UP_IRQHandler) 中,进行计数操作。 - 设
ARR值对应的溢出时间为T_irq。如果T_irq小于目标时间TotalTime,可以在中断函数里设置一个软件计数器变量(例如elapsed_ticks)。每进入一次更新中断(即每次时间溢出),就让elapsed_ticks加1。 - 将
elapsed_ticks * T_irq与预设的总运行时间TotalTime进行比较。 - 当
elapsed_ticks * T_irq >= TotalTime时,说明电机应该停止。 - 在中断服务程序中,清除中断标志位(HAL库会自动处理)并根据比较结果关闭驱动电机的输出信号(如关闭PWM通道输出
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1),或拉低控制GPIO等)。 - 最后关闭定时器中断(可选,取决于是否需要重复启动计时)和/或停止定时器。
- 在定时器的更新中断服务程序(
- 优点: 精度高(依赖晶振精度和定时器分辨率),硬件计时可靠。
- 缺点: 需要处理中断,如果
TotalTime特别长(如小时),而T_irq设置得很小(精度要求高),则中断频率会非常高,影响主程序效率。这时需要平衡中断频率和时间分辨率。通常让T_irq在10ms - 100ms区间是个不错的选择。
- 基本步骤:
-
使用系统滴答定时器:
- SysTick是ARM Cortex-M内核自带的一个24位递减计数定时器,通常用作操作系统的时钟节拍或提供精确延时(
HAL_Delay()就是基于它)。 - 方法:
- 在电机启动时,读取当前的系统滴答计数值(例如
start_tick = HAL_GetTick())。 - 在程序的某个地方(例如主循环
while(1)内或专门的状态机中)不断读取当前的滴答计数值(current_tick = HAL_GetTick())。 - 计算已运行时间
elapsed_time = current_tick - start_tick(注意处理HAL_GetTick()的计数值是ms为单位的)。 - 当
elapsed_time >= TotalTime(单位为ms)时,关闭电机控制信号。
- 在电机启动时,读取当前的系统滴答计数值(例如
- 优点: 实现简单,无需专门初始化定时器,直接利用HAL库现有机制。
- 缺点: 精度略低于硬件定时器(有中断响应等延迟),需要轮询比较(放在主循环中)。如果主循环阻塞时间长,会导致检测不够及时(但在电机控制这类实时应用里,主循环通常需要快速响应)。
- SysTick是ARM Cortex-M内核自带的一个24位递减计数定时器,通常用作操作系统的时钟节拍或提供精确延时(
-
使用实时时钟:
- 如果你的STM32带有RTC外设,并且需要控制的时间非常长(比如天、月),或者系统可能断电后需要保存时间信息,RTC是更好的选择。
- 方法:
- 配置好RTC(设置日期、时间)。
- 在电机启动时,读取并保存当前的RTC时间点(如日期时间结构体或秒计数)。
- 在程序中轮询(或结合其他定时机制)当前的RTC时间。
- 计算当前RTC时间与启动时间点之间的秒(或更精细单位)差值。
- 当差值超过设定时间后,关闭电机。
- 优点: 适合超长时间控制,断电(如果有后备电池)后时间仍在走动。
- 缺点: RTC时钟精度相对较低(外部或内部低速晶振),初始化和获取时间稍复杂,需要额外的纽扣电池支持断电后继续计时。
控制电机信号:
无论使用哪种计时方法,最终都需要在时间到时关闭控制电机的信号。信号类型取决于你的电机驱动器类型:
- PWM控制: 如果电机使用PWM控制速度,则调用如
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1)来关闭TIMx通道x的PWM输出。 - 使能引脚(EN)控制: 如果驱动器有使能脚,则在时间到时将该引脚对应的GPIO设置为低电平(或高电平,具体取决于驱动器逻辑)。
HAL_GPIO_WritePin(Motor_EN_GPIO_Port, Motor_EN_Pin, GPIO_PIN_RESET); - 方向引脚(DIR) + 使能: 在使能的基础上,可能有方向控制,时间到时也只需关闭使能脚即可停止。
- 继电器/接触器控制: 如果通过继电器控制电机电源,则控制继电器的GPIO信号拉低以关闭继电器。
HAL_GPIO_WritePin(Relay_GPIO_Port, Relay_Pin, GPIO_PIN_RESET);
关键考虑因素:
- 时间精度要求: 需要达到毫秒、秒、分、小时还是更长?这决定了选择哪种计时方式以及定时器的参数设置。高精度通常用硬件定时器,长周期用SysTick轮询或RTC。
- 可重复性: 每次启动是否需要重新计时?需要保存运行时间记录?如果需要频繁启动停止并记录累计时间,需要良好的软件设计。
- 断电后保存时间/状态: 如果需要实现意外断电后下次开机还能累计上次时间,就需要使用EEPROM、Flash存储模块或利用带电池的RTC来保存状态(如已运行时间、电机状态)。
- 启停控制细节:
- 启动条件: 电机启动除了设置时间还需要什么条件(按键、传感器信号)?
- 停止方式: 是立即停止(断电)还是需要缓慢停止(如PWM逐渐减小)?立即停止对某些电机和负载可能不好。
- 安全:
- 必须有可靠的急停机制(独立于软件逻辑),例如一个连接到驱动器的急停按钮。
- 程序死机时的保护:使用看门狗复位单片机。
- 电机过流、过温保护(如有传感器)。
- 硬件隔离:确保控制信号的IO与电机大功率电路有足够的隔离(使用光耦等)。
- 驱动能力: STM32的GPIO引脚驱动能力有限,不能直接驱动普通直流电机(小电流空心杯可能可以)。必须使用功率驱动器件,如MOSFET、集成电机驱动器芯片(如DRV88xx, L298N, BTS7960等)、继电器模块等。选择与电机功率匹配的驱动器至关重要。
- 软件结构: 将计时逻辑、电机控制逻辑合理组织到状态机或任务中。
示例流程 (基于硬件定时器中断 + PWM控制):
-
系统初始化:
- 配置系统时钟。
- 配置用于驱动电机的定时器PWM输出。
- 配置一个用于计时的硬件定时器(如TIM2),设置预分频和重装载值使其每10ms产生一次中断(ARR = (SystemCoreClock / Prescaler) * 0.01 - 1)。
- 启用TIM2的更新中断。
- 初始化相关变量:
total_time_ms = 60000;(目标运行时间:1分钟 = 60000毫秒),elapsed_ticks = 0;,motor_running = 0; - 配置必要的按键GPIO(用于启动)、急停GPIO(直接连接驱动器的EN,可独立停止)。
-
启动电机:
- 检测到启动条件(如按下按键)。
- 启动PWM输出
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); - 重置计时器:
elapsed_ticks = 0; - 启动计时定时器:
HAL_TIM_Base_Start_IT(&htim2);// 启动TIM2并开启更新中断 - 设置状态标志:
motor_running = 1;
-
TIM2中断服务程序(每10ms进入一次):
- 清除中断标志(HAL库会处理)。
if (motor_running) {// 确保只有在电机运行时才累加时间elapsed_ticks++;if (elapsed_ticks * 10 >= total_time_ms) {// elapsed_ticks * 10ms >= 目标时间(ms)HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1);// 停止PWM输出,电机停转HAL_TIM_Base_Stop_IT(&htim2);// 可选,停止定时器中断motor_running = 0;// 可以在这里做一些停止处理,如蜂鸣提示等
}
}
-
主循环:
- 处理其他任务(如显示剩余时间:
remaining_time_ms = total_time_ms - elapsed_ticks * 10)。 - 检测按键或其他事件。
- 执行程序看门狗刷新。
- 处理其他任务(如显示剩余时间:
总结:
选择硬件定时器中断通常是实现高精度、周期性计时停止电机的首选方法,因为它保证了计时的独立性和准确性。对于简单且对实时性要求不高(秒级)的应用,使用SysTick在主循环中轮询也很方便。对于超长周期控制或需要断电保存时间的场景,RTC是更好的选择。
务必重视硬件驱动设计和安全保护机制! PWM输出通道、方向控制引脚等需要准确映射到你的电机驱动器电路上。
西门子SCL编程50台电机运行时间累计方法

当RUN信号为TRUE时,开始计时,为FALSE时停止计时,单次运行时间清零,长按RESET为5秒时,单次和总运行时间都清零。
2023-11-27 09:59:37
MES如何帮助增加机器正常运行时间
实施制造执行系统(MES)的好处很多。其中,MES软件可以通过多种方式帮助增加机器的正常运行时间。正常运行时间是指制造机械或设备的效率和可用性。每当机器停机(无论原因如何)时,制造商
资料下载
![]() 何
2023-11-14 15:28:29
何
2023-11-14 15:28:29
实用 | 获取单片机代码运行时间的方法
单片机编程者需要知道自己的程序需要花费多长时间、while周期是多少、delay延时是否真如函数功能描述那样精确延时。
资料下载
![]() 吴湛
2022-02-08 16:50:53
吴湛
2022-02-08 16:50:53
利用定时器实现51单片机返回上电运行时间功能
数和微秒数。我们可以利用51单片机的定时器中断实现这个功能。具体实现的思路是设置1个长整型的全局时间变量sysRunmillis保存单片机上电后
资料下载
![]() 向日葵的花季
2021-11-20 17:36:02
向日葵的花季
2021-11-20 17:36:02
简析获取单片机代码运行时间的方法资料下载
电子发烧友网为你提供简析获取单片机代码运行时间的方法资料下载的电子资料下载,更有其他相关的电路图、源代码、课件教程、中文资料、英文资料、参考设计、用户指南、解决方案等资料,希望可以帮助到广大的电子工程师们。
资料下载
![]() 佚名
2021-04-24 08:49:35
佚名
2021-04-24 08:49:35
变频器带动电机运行时发抖是怎么回事?

频率,则变频器不输出10-14Hz的频率,直接跳过。带动电机运行时产生抖动的处理方案以三菱变频器带动电机运行时产生抖动分析为例,如下:(一)、机械共振原因:机械共振
2023-10-31 08:07:33
获取单片机运行时间
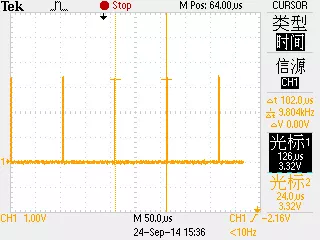
的开始阶段使单片机的一个GPIO输出高电平,在待测程序段的结尾阶段再令这个GPIO输出低电平。用示波器通过检查高电平的时间长度,就知道了这段代码的运行时间
2022-08-26 20:26:00
浅析STM32代码运行时间的技巧

是:在待测程序段的开始阶段使单片机的一个GPIO输出高电平,在待测程序段的结尾阶段再令这个GPIO输出低电平。用示波器通过检查高电平的时间长度,就知道了这段代码的
2021-11-09 09:52:04

- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- dtmb信号覆盖城市查询
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 如何进行编码器的正确接线?接线方法介绍
- 什么是场效应管?它的作用是什么?
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- amoled屏幕和oled区别
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 苹果笔记本macbookpro18款与19款区别
- 通讯隔离作用
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105