

机器视觉系统主要由哪些模块构成?
一个典型的机器视觉应用系统包括图像捕捉、光源系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块。
更多
机器视觉系统是一个复杂的集成系统,其核心模块通常包括以下几个部分:
-
图像采集 (Image Acquisition):
- 光源 (Lighting): 为被检测物体提供稳定、均匀、合适方向和强度的光照,创造高对比度图像,突出特征。光源设计至关重要。
- 镜头 (Lens): 将物体成像在图像传感器上。选择需要根据视场、工作距离、分辨率等参数,常见的有远心镜头、定焦镜头、变焦镜头等。
- 图像传感器/相机 (Image Sensor / Camera): 将光学图像转换成电子信号(通常为数字图像)。主要类型有:
- 面阵相机 (Area Scan Camera): 拍摄二维图像。
- 线阵相机 (Line Scan Camera): 拍摄单行像素,通过相对运动扫描形成二维图像。
- 图像采集卡 (Frame Grabber / Image Acquisition Card - 可选,尤其对高速或特定接口): 将相机输出的信号高速传输到计算机进行存储或处理(现在很多相机直接通过GigE Vision, USB3 Vision等接口连接,不一定需要独立采集卡)。
-
图像处理 (Image Processing):
- 这是系统的智能核心,利用软件算法对采集到的原始图像数据进行计算和分析。
- 预处理 (Pre-processing): 改善图像质量,为后续分析做准备。常用操作包括:
- 降噪 (Noise Reduction / Filtering): 如均值滤波、中值滤波、高斯滤波。
- 增强 (Enhancement): 如对比度增强、直方图均衡化。
- 几何变换 (Geometric Transformation): 如缩放、旋转、平移、仿射变换、透视校正。
- 色彩空间转换 (Color Space Conversion): 如从RGB到灰度、HSV等。
- 特征提取 (Feature Extraction): 从图像中识别和量化感兴趣的特定信息(即特征),如:
- 边缘检测 (Edge Detection): 如Sobel, Canny算子。
- 斑点检测 (Blob Analysis): 检测和测量连通区域。
- 纹理分析 (Texture Analysis):
- 模式匹配/定位 (Pattern Matching / Location): 查找特定图案、模板或特征点的位置和方向(如几何匹配、灰度匹配、特征匹配)。
- 色彩分析 (Color Inspection):
- 光流 (Optical Flow): (用于运动分析)
- OCR/OCV (Optical Character Recognition / Verification): 读取或验证字符。
- 尺寸测量 (Metrology / Gauging): 精确测量物体的尺寸、角度、间距等几何参数。
- 识别与决策 (Recognition & Decision Making): 基于提取的特征,对物体进行分类、识别缺陷、读取代码(如二维码、条码)或做出“通过/不通过”的判断等。
-
通信与控制 (Communication & Control):
- 将图像处理的结果传递给其他设备或系统。
- 通信接口 (Communication Interface): 将检测结果(如位置、尺寸、缺陷信息、OK/NG信号)传输给上位机PLC、机器人控制器、数据库、HMI或执行机构。常用接口包括:数字I/O (Digital Input/Output)、以太网 (TCP/IP, EtherNet/IP, PROFINET, Modbus TCP)、串口 (RS232/485)、现场总线等。
- 输出控制 (Output Control): 根据处理结果触发相应的动作,例如:
- 控制PLC启动剔除装置(如气缸、分流器)移除不合格品。
- 控制机器人定位抓取或引导操作。
- 发送指令调整生产设备参数。
-
(可选/特定系统) 运动控制 (Motion Control - Optional):
- 当需要扫描运动中的物体(如使用线阵相机)或需要精确定位相机/物体时,需要协调相机拍摄与物体/平台的运动。这通常由运动控制卡、PLC或机器人控制器完成。
-
用户界面 (User Interface - UI):
- 供操作人员与系统交互:设置参数、配置检测流程、监控运行状态、查看实时图像和结果、生成报表、调试程序等。可以是桌面程序、Web界面或触摸屏HMI。
-
(核心支撑) 视觉处理软件 (Vision Processing Software):
- 这是实现所有图像处理算法和系统集成的平台。可以是:
- 库/开发包 (Libraries / SDKs): 如OpenCV, Halcon, VisionPro, MVTec MERLIC, NI LabVIEW Vision Development Module等,需要程序员集成开发。
- 应用软件/配置工具 (Application Software / Configuration Tools): 提供图形化编程或配置环境(如拖拽模块),便于工程技术人员使用,如Cognex VisionPro (Quickscript), Keyence CV-X, OMRON FH Series 软件等。
- 软件是实现系统“智能”的关键。
- 这是实现所有图像处理算法和系统集成的平台。可以是:
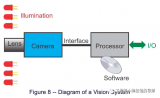
总结来说,机器视觉系统的基本流程和工作原理是:
- 通过光源提供合适光照照射物体。
- 镜头将物体成像在相机的图像传感器上。
- 图像传感器将光信号转换为电信号(数字图像)。
- 图像采集卡(如需要)将图像数据传输到计算机/处理器。
- 视觉处理软件(运行在计算机/嵌入式处理器上)执行复杂的图像处理和分析算法(预处理、特征提取、测量、识别、决策)。
- 处理结果通过通信与控制接口传递给执行机构(如PLC、机器人)进行相应操作。
- 用户界面用于系统配置、监控和交互。
这些模块协同工作,使机器能够“看见”并理解其视觉环境,从而完成自动化任务。


7天热门专题
 换一换
换一换
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 芯片的工作原理是什么?
- ssd是什么意思
- 什么是蓝牙?它的主要作用是什么?
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- dtmb信号覆盖城市查询
- 怎样挑选路由器?
- 华为芯片为什么受制于美国?
- 元宇宙概念股龙头一览
- type-c四根线接法图解
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- iphone13promax电池容量是多少毫安
- 苹果无线充电器怎么使用?
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 传感器常见类型有哪些?
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023018690号