

山茱萸采摘机
关于山茱萸采摘机,以下是综合信息的总结和分析:
现状与挑战
-
无专用成熟设备
目前市场上暂无针对山茱萸果实特性的成熟商业化采摘机。主要因其种植分散、地形复杂(多山地)且果实特性特殊:- 果实小而软(直径约1-2cm),机械易损伤
- 枝干细脆,强振动易断裂
- 成熟期不一致,需人工判断
-
替代方案尝试
- 手持式气吸采果器:通过负压吸取果实,适用于低矮枝条,但效率有限(约人工2-3倍),损伤率约15%。
- 振动式采收:需改造现有林果采收机(如核桃采收机),但山茱萸果柄韧性高,脱落需较大振幅,可能导致枝叶损伤。
- 半机械化辅助:采用可移动接果伞+人工手持振动棒,降低果实落地破损率,效率提升约40%。
研发方向(实验室阶段)
- 仿生机械手:浙江大学团队开发的柔性夹爪(专利CN202110XXXXXX),模拟人工捻摘动作,损伤率<5%,但单台效率仅为人工作业60%。
- 光谱识别+精准采收:中国农科院项目结合近红外光谱判断成熟度,配合机器人臂采收,成本高昂且适用于平整果园。
- 负压自适应系统:江苏农机制造商试验的负压分级系统,通过气流分级吸附避免未成熟果脱落。
实用建议
-
小规模种植
推荐 "气吸采果器 + 折叠接果网" 组合(设备成本约¥2000-5000),降低采收破损率,适合家庭农场。 -
规模化种植
- 优先进行 "篱笆式整形修剪"(参考陕西佛坪县模式),使树形适应机械作业。
- 定制 低频振动采收车(参考宁夏枸杞采收机改装),关键参数:
振动频率≤5Hz;振幅范围3-5cm;接果带缓冲层
-
合作研发
可对接机构:- 农业农村部南京农机化研究所(特色作物采收研究室)
- 西北农林科技大学(林果机械研发中心)
- 河南山茱萸工程中心(正在开展采收设备试点)
政策支持
2023年《丘陵山区小型农机补贴目录》新增 "林果柔性采收装置" 类别,部分省份(陕西/河南)提供40%购机补贴。
案例参考:陕西汉中种植户采用改装后的茶园采茶机(增加防护网+减压阀),8小时采收量达300kg(较人工提升120%),但需后续分拣未成熟果。
建议持续关注2024年10月将在杨凌农高会发布的 "山茱萸仿生采收机器人" 中试机型,此设备由西农大与汉江药业联合开发,目标采收效率200kg/小时。
汉威科技开启采摘机器人触觉革命
万万没想到,在科技发达的现代,果蔬采摘依然是个大难题!一到水果成熟季,果农们就为短期完成大量采摘的问题发愁,尤其是草莓、车厘子这类皮薄娇嫩的品类。
2025-02-28 16:40:25
MT6501 磁编码 IC 如何助力 AGV 定位采摘机器人精准作业
在当今科技飞速发展的时代,自动化技术在各个领域的应用不断深化,其中 AGV(Automated Guided Vehicle,自动导引车)定位采摘机器人作为农业智能化的重要成果,正逐渐改变着农业生产
2024-08-16 17:55:57
探索 MT6835 磁编码 IC 在 AGV 定位采摘机器人中的神奇应用
在当今科技飞速发展的时代,各种创新技术层出不穷,为我们的生活和工作带来了前所未有的便利。其中,AGV 定位采摘机器人凭借其高效、精准的作业能力,逐渐成为农业领域的一颗璀璨新星。而在这背后
2024-08-16 17:45:15
基于视觉导航和RBF的移动采摘机器人路径规划研究
为了提高采摘机器人自主导航和路径规划能力,提出了基于计算机视觉路径规划和RBF神经网络自适应逼近算法的导航方法。使用图像分割,平滑处理和边缘检测技术,根据图像像素灰度值确定了导航线的位置,利用
资料下载
佚名
2020-08-27 14:30:00
采摘机器人技术发展中面临的技术难题及解决方法介绍
采摘机器人是21 世纪精准农业的重要装备之一, 是未来智能农业机械的发展方向。移动式采摘机器人由机械手、末端执行器、移动机构、机器视觉系统以及控制系统等构成。机械手的结构形式和自由度直接影响
资料下载
佚名
2020-06-30 17:02:08
【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
机器人的动作流程 三、草莓采摘机器人的控制系统设计 1、硬件部分介绍 草莓采摘机器人设计的硬件控制系统框图如图2.1所示,包括核心控制单元、传感器、驱动器等。核心控制单元包括单片
【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
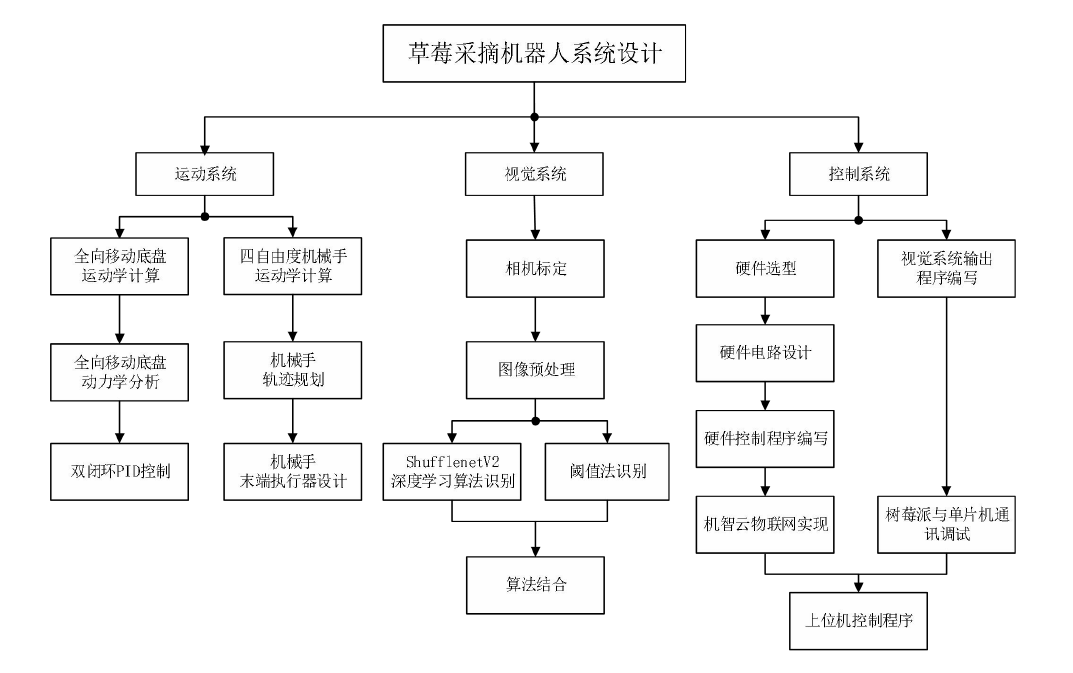
系统的软件设计主要包括RT-thread实时操作系统在单片机上的移植调试、树莓派3B+视觉识别、树莓派与单片机数据传输的通讯调试、机智云物联网和WIFI模块在单片机上的接入以及树莓派上位机控制软件
2023-08-16 11:01:13
可伸缩便携式刺梨采摘器设计

随着人们对刺梨有效成分食用与药用价值的深入研究,云贵刺梨种植已形成产业化与规模化。但目前这些地区的刺梨采摘仍以手工方式为主,即在采摘时用戴手套的手直接抓紧刺梨,用力将其从树枝上摘下。这种作业方式
2023-07-17 14:15:00
基于ATmega32的模拟采摘机器人
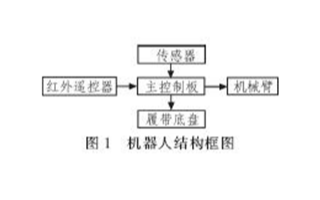
针对以上存在的问题,本文设计了一款基于ATmega32的模拟采摘机器人,能实现人工操作的机械采摘,通过红外遥控控制机械臂使末端夹持器伸到目标果实所在位置,进行抓取工作,完成
2022-04-12 11:21:54
西班牙Agrobot公司开发出草莓采摘机器人
而说到草莓,吃起来香,种植以及采摘可不容易,一来草莓非常不耐寒,二来草莓对光照也有较高要求,此外草莓很脆弱,稍有不慎就会磕坏碰坏。好在,随着科技日新月异地发展,越来越多先进的设备被用于草莓的种植和采摘中,其中就包括草
2021-03-24 17:57:18
世界首个覆盆子采摘机器人上线 机器人代替人类采摘水果或成趋势
世界上第一台采摘覆盆子的机器人正在覆盆子果园进行作业,它颤颤微微的采摘着其中一颗覆盆子,就像一个蹒跚学步的孩子在喝汤时避免把汤洒出来一样。
2019-05-30 17:13:37
问一个水果采摘机器人 竞赛的问题
要求可以实现采摘时采摘机械手查询和采摘的区域设定。区域设定为圆形,圆心坐标和查询圆半径可通过按键设定,在模拟果树的平面上绘有坐标刻度,坐标值的单
- 如何分清usb-c和type-c的区别
- 中国芯片现状怎样?芯片发展分析
- vga接口接线图及vga接口定义
- 芯片的工作原理是什么?
- 华为harmonyos是什么意思,看懂鸿蒙OS系统!
- 什么是蓝牙?它的主要作用是什么?
- ssd是什么意思
- 汽车电子包含哪些领域?
- TWS蓝牙耳机是什么意思?你真的了解吗
- 什么是单片机?有什么用?
- 升压电路图汇总解析
- plc的工作原理是什么?
- 再次免费公开一肖一吗
- 充电桩一般是如何收费的?有哪些收费标准?
- ADC是什么?高精度ADC是什么意思?
- EDA是什么?有什么作用?
- dtmb信号覆盖城市查询
- 中科院研发成功2nm光刻机
- 苹果手机哪几个支持无线充电的?
- type-c四根线接法图解
- 华为芯片为什么受制于美国?
- 怎样挑选路由器?
- 元宇宙概念股龙头一览
- 锂电池和铅酸电池哪个好?
- 什么是场效应管?它的作用是什么?
- 如何进行编码器的正确接线?接线方法介绍
- 虚短与虚断的概念介绍及区别
- 晶振的作用是什么?
- 大疆无人机的价格贵吗?大约在什么价位?
- 苹果nfc功能怎么复制门禁卡
- 单片机和嵌入式的区别是什么
- amoled屏幕和oled区别
- 复位电路的原理及作用
- BLDC电机技术分析
- dsp是什么意思?有什么作用?
- 苹果无线充电器怎么使用?
- iphone13promax电池容量是多少毫安
- 芯片的组成材料有什么
- 特斯拉充电桩充电是如何收费的?收费标准是什么?
- 直流电机驱动电路及原理图
- 传感器常见类型有哪些?
- 自举电路图
- 通讯隔离作用
- 苹果笔记本macbookpro18款与19款区别
- 新斯的指纹芯片供哪些客户
- 伺服电机是如何进行工作的?它的原理是什么?
- 无人机价钱多少?为什么说无人机烧钱?
- 以太网VPN技术概述
- 手机nfc功能打开好还是关闭好
- 十大公认音质好的无线蓝牙耳机
湘ICP备2023036445号-105