
资料下载


如何设计一个基于汽车横摆角速度的模糊自适应PID控制器
分享资料个
本文借助某款轿车的部分技术参数,设计一个基于汽车横摆角速度的模糊自适应PID控制器。首先建立汽车的理想二自由度参考模型,使其能比较真实的反映汽车的动力学特性。然后结合PID控制理论,以车辆转向行驶状态作为参考,设计PID控制器。进而应用Matlab/Simulink仿真软件,构建汽车横摆角速度PID控制的虚拟仿真平台,实现汽车横摆角速度PID控制器的虚拟仿真调试。
汽车的安全性能对人类生命和财产安全的影响是不言而喻的。汽车行驶的安全性很大程度上依赖于横摆和侧倾动力学,尤其是横摆稳定性。横摆稳定性的丧失将使汽车失去转向能力或引起汽车的剧烈回转。汽车失去横摆稳定性是一种高发并且很危险的交通事故。德国奥迪公司的统计数据[1]表明,在80 km/h到100 km/h 的车速下行驶的汽车发生的交通事故中,几乎有40%的事故与汽车失去横摆稳定性有关;随着车速的提高,由汽车失稳引起的交通事故所占的比例也提高,并且当车速超过160 km/h 时基本上所有的事故都与汽车失稳有关。因此,通过主动控制提高汽车的横摆稳定性对提高汽车的行驶安全性具有重要的意义。
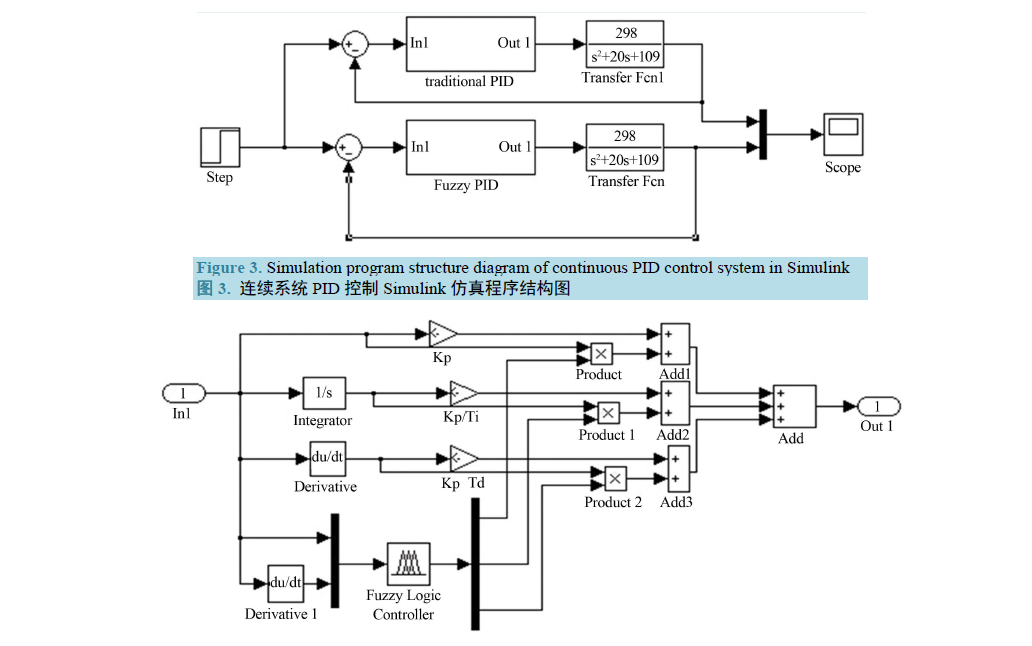
汽车横摆角速度,作为横摆稳定性的主要控制变量之一,对其进行PID 自动控制,这可以明显改善汽车的横摆稳定性,进而有效地提高汽车的行驶安全性。本文研究的基本思路是首先建立基于汽车转向的简化模型——二自由度模型,使其能比较真实地反映汽车的动力学特性;然后,基于模糊控制理论进行PID 控制器设计并用Matlab 软件建立横摆角速度PID 控制器模型;最后在Simulink 环境下进行系统仿真。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






