
资料下载


如何使用太阳能实现光电导航搬运车的设计论文
分享资料个
我们队在这次光电竞赛中所选的题目是《基于太阳能的光电导航搬运车》,要求利用太阳能电池和光电导航技术在6 分钟之内, 绕过规定的障碍物, 运送尽可能多的物体到指定地点。
该题目的关键点在于太阳能电池的选择, 以及稳定性好的、可靠性高的、易于实现的光电导航手段。
关于太阳能电池的选择, 应考虑的因素包括输出功率、电压、抗干扰能力以及和电源模块的耦合性等。其中, 最重要的一个指标是输出功率。由于,每次搬运重物的数目没有限制,输出功率越高的电源自然能满足更好的小车速度和载重量的要求。目前,利用光电技术进行导航的手段主要有: 激光雷达(LiDAR )导航、机器视觉(MachineVision) (计算机视觉)导航、红外(IR) 导航、基于激光陀螺仪和加速度计的惯性导航(INS)和其它一些利用光电子器件进行导航的技术等。本系统采用机器视觉进行导航,理由如下:
1. 随着人工智能(AI) 和机器人技术的不断发展, 模拟人眼视觉的机器视觉技术在工业、农业和医学等领域里有着非常广泛的应用和发展前景。
2. 图像采集技术的发展和数字图像处理算法及速度的日臻完善, 使得视觉定位具有实时性强、灵活度高、定位准、获得的信息量丰富等的特点。
1.2 系统设计
1.2.1 整个小车系统各个部分的框图
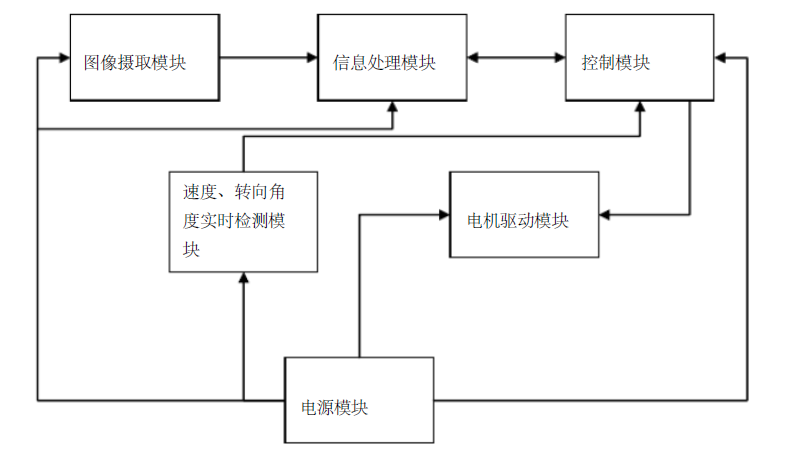
1.2.2 各模块功能
1. 电源模块为其它各模块提供稳定的电源支持。
2. 图像摄取模块负责将光信号转换为电信号,为后续处理打下基础。
3. 速度、转向角度实时检测主要是为控制模块提供必要的信息支持。
4. 信息处理模块主要负责图像处理算法的实现。
5. 控制模块负责整个系统的控制。
6. 电机驱动模块实现小车的起动、停止、加速、转向等操作。
太阳电池能量转换的基础是结的光生伏特效应。将外电路短路, 则外电路中就有与入射光能量成正比的光电流流过,这个电流称作短路电流。若将PN结两端开路,则由于电子和空穴分别流入N区和P 区,使N区的费米能级比P 区的费米能级高, 在这两个费米能级之间就产生了电位差VOC。可以测得这个值,并称为开路电压。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




