
资料下载


PID控制线跟随机器人
KANA
分享资料个
描述
概述
大多数漫游车自主机器人需要的一项功能是线路跟踪。该项目的目的是构建一个线跟随机器人,并以一种有趣的方式开始学习 PID 控制器。
部分
机器人与两个电机、Rosbot 底板和一个 5 通道传感器一起正常工作。与其他产品不同,您不必购买额外的 H 桥电机驱动器或各种组件,因为 Rosbot 基板具有内置的 2x H 桥双驱动器。只需将电机连接到 Rosbot 基板,它将提供比 Arduino Uno 更多的电力。
- 机器人框架: KittenBot 阳极氧化铝底盘
酷酷且坚固的底盘,带有大量安装孔(4.8 毫米乐高机械组),您绝对可以将此底盘重复用于其他有趣的项目。
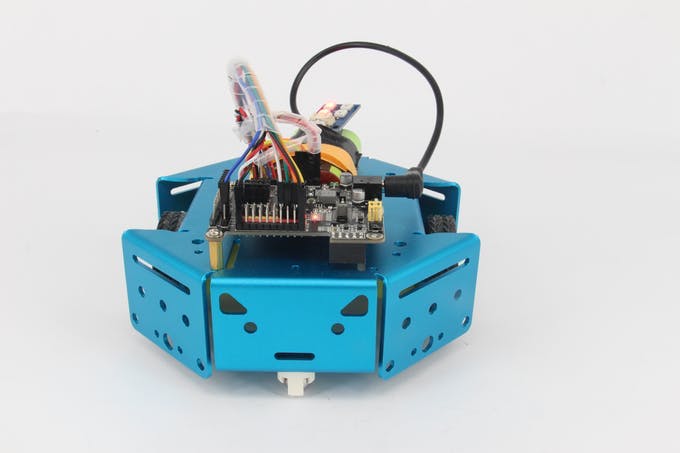
- 机器人的大脑:RosBot 底板
一个基于 Arduino UNO 的主板,带有 2 个板载双 H 桥电机驱动器。
- 机器人的眼睛: 5 通道 IR 线跟随跟踪器传感器
5通道红外探测器,更准确、更稳定。
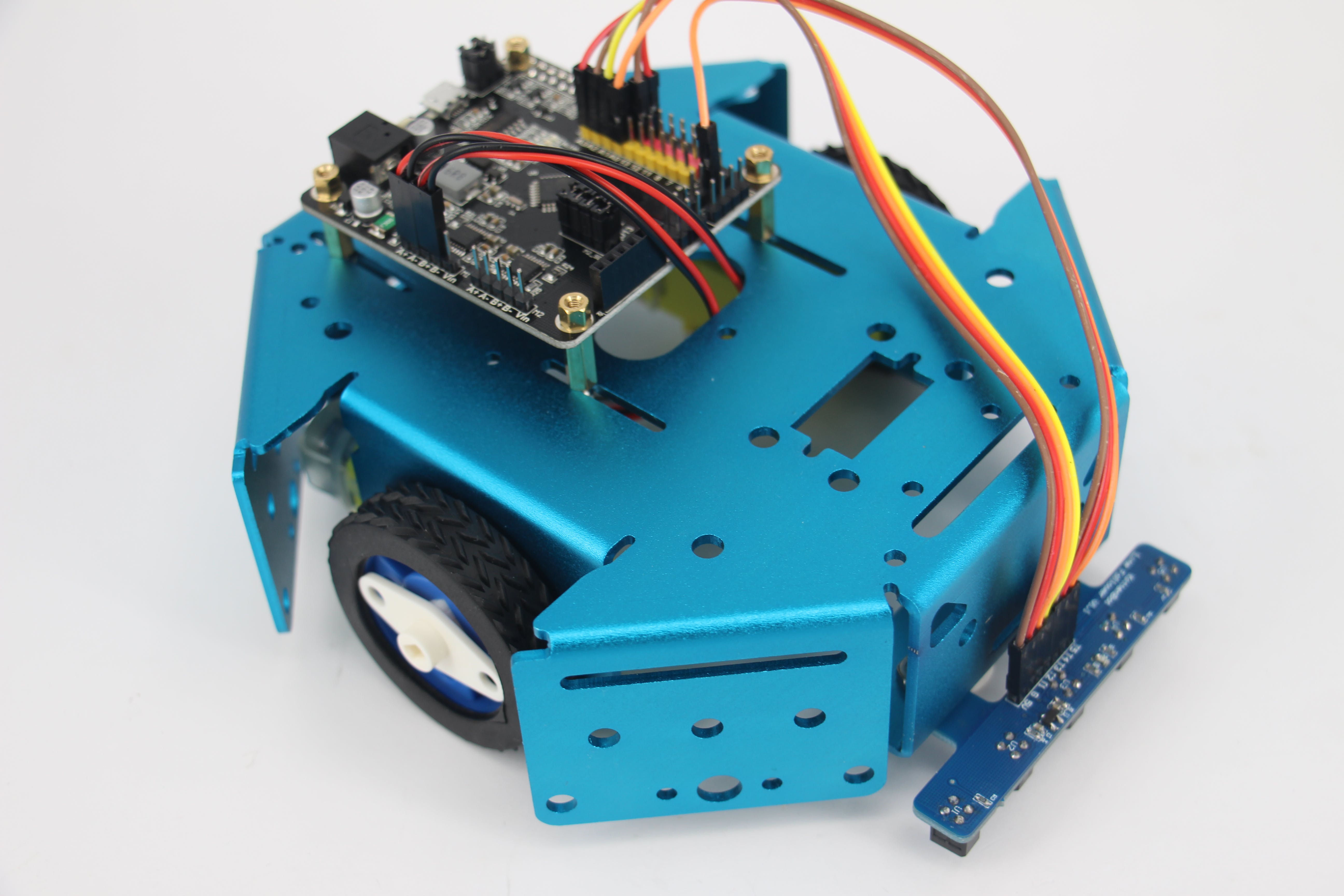
第 1 步:组装
这个机器人很容易组装,按照说明操作,大约需要 15 分钟。
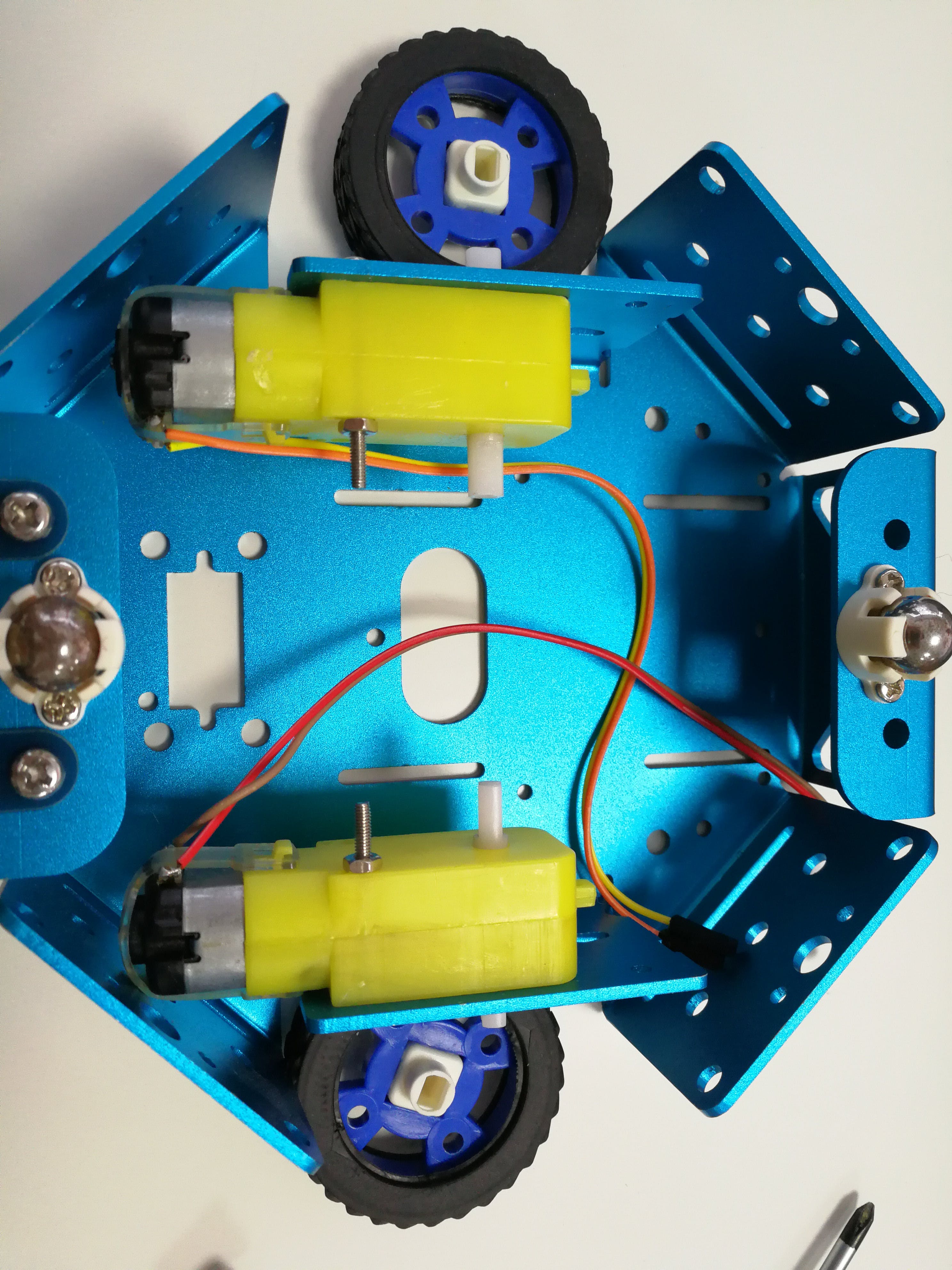
首先,将电机连接到底盘的侧面,只需插入橡胶轮即可。
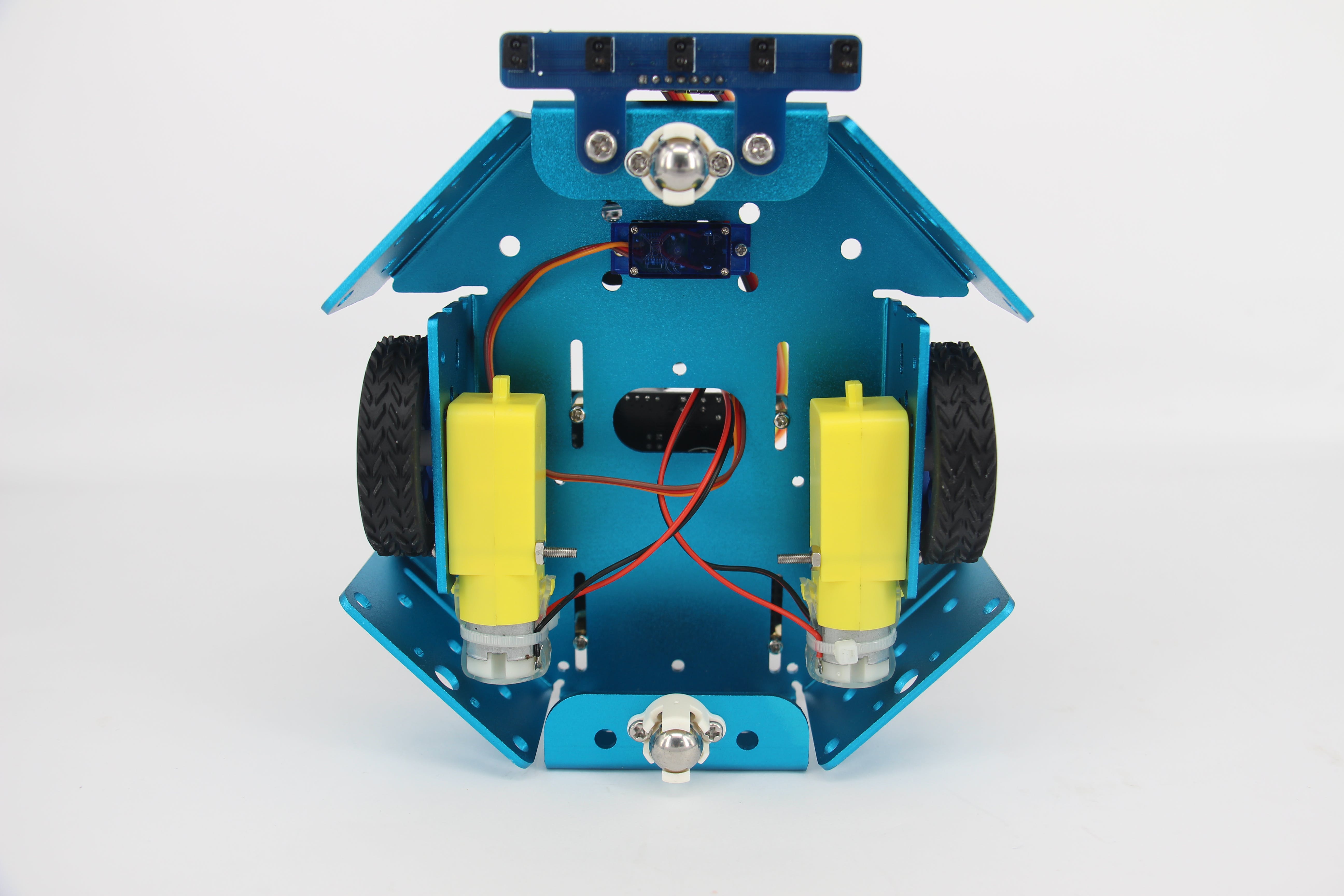
将 5 通道红外传感器安装到机箱前部。
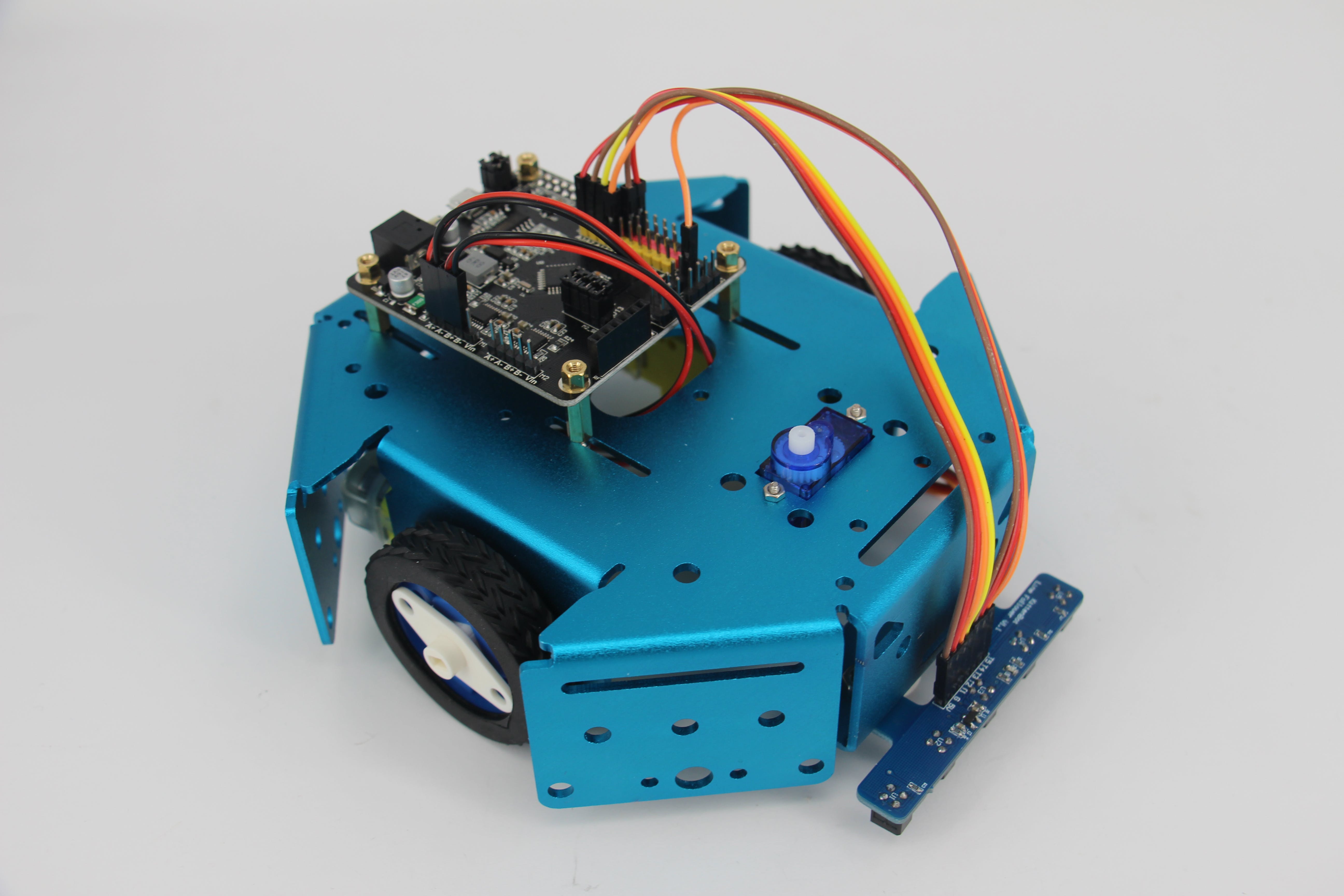
将您的 Rosbot 底板连接到底盘上,然后机器人就可以开始接线了。
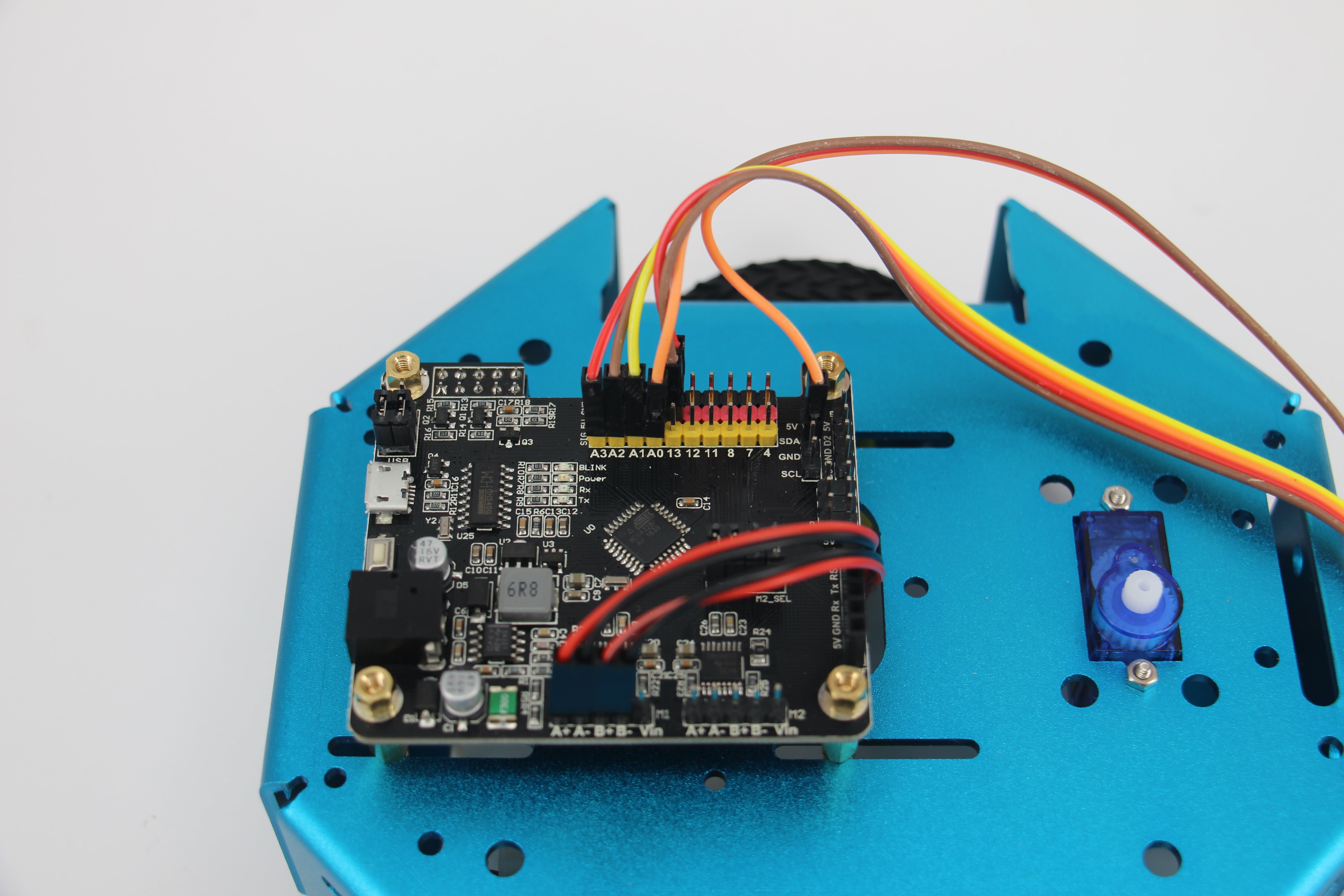
第2步:拧
以下是 5 通道红外传感器的连接:
- VCC 至 5V
- GND 到 RosBot 的 GND
- T1-T4 到引脚 A0-A3
- T5 到 SDA 引脚
直流电机只需连接到引脚 A+A- 和引脚 B+B-。
编码
在代码中,我们有一个状态机来指示每个可能的传感器阵列输出。机器人根据传感器阵列输出向某个方向移动。
void stateMachine(int a) {
switch (a) {
case B00000:
outlineCnt++;
break;
case B11111:
outlineCnt++;
break;
case B00010:
case B00110:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(0, 50, 0));
bias = 1;
break;
case B00001:
case B00011:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(0, 200, 0));
bias = 2;
break;
case B00100:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(0, 0, 20));
bias = 0;
break;
case B01000:
case B01100:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(50, 0, 0));
bias = -1;
break;
case B10000:
case B11000:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(200, 0, 0));
bias = -2;
break;
default:
Serial.println(a,BIN);
outlineCnt++;
break;
}
我们已经设置了误差、比例项、积分项和导数项的值。
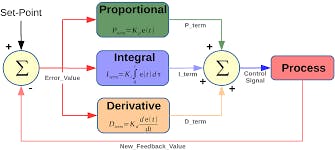
float Kp = 25;
float Ki = 0.15;
float Kd = 1200;
float error, errorLast, erroInte;
float calcPid(float input) {
float errorDiff;
float output;
error = error * 0.7 + input * 0.3; // filter
//error = input;
errorDiff = error - errorLast;
erroInte = constrain(erroInte + error, -50, 50);
output = Kp * error + Ki * erroInte + Kd * errorDiff;
Serial.print(error); Serial.print(' ');
Serial.print(erroInte); Serial.print(' ');
Serial.print(errorDiff); Serial.print(' ');
Serial.println(output);
errorLast = error;
return output;
操纵值以找到最适合您的机器人的值。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




