
资料下载


伺服控制面板开源分享
陈伟
分享资料个
描述
关于这个项目
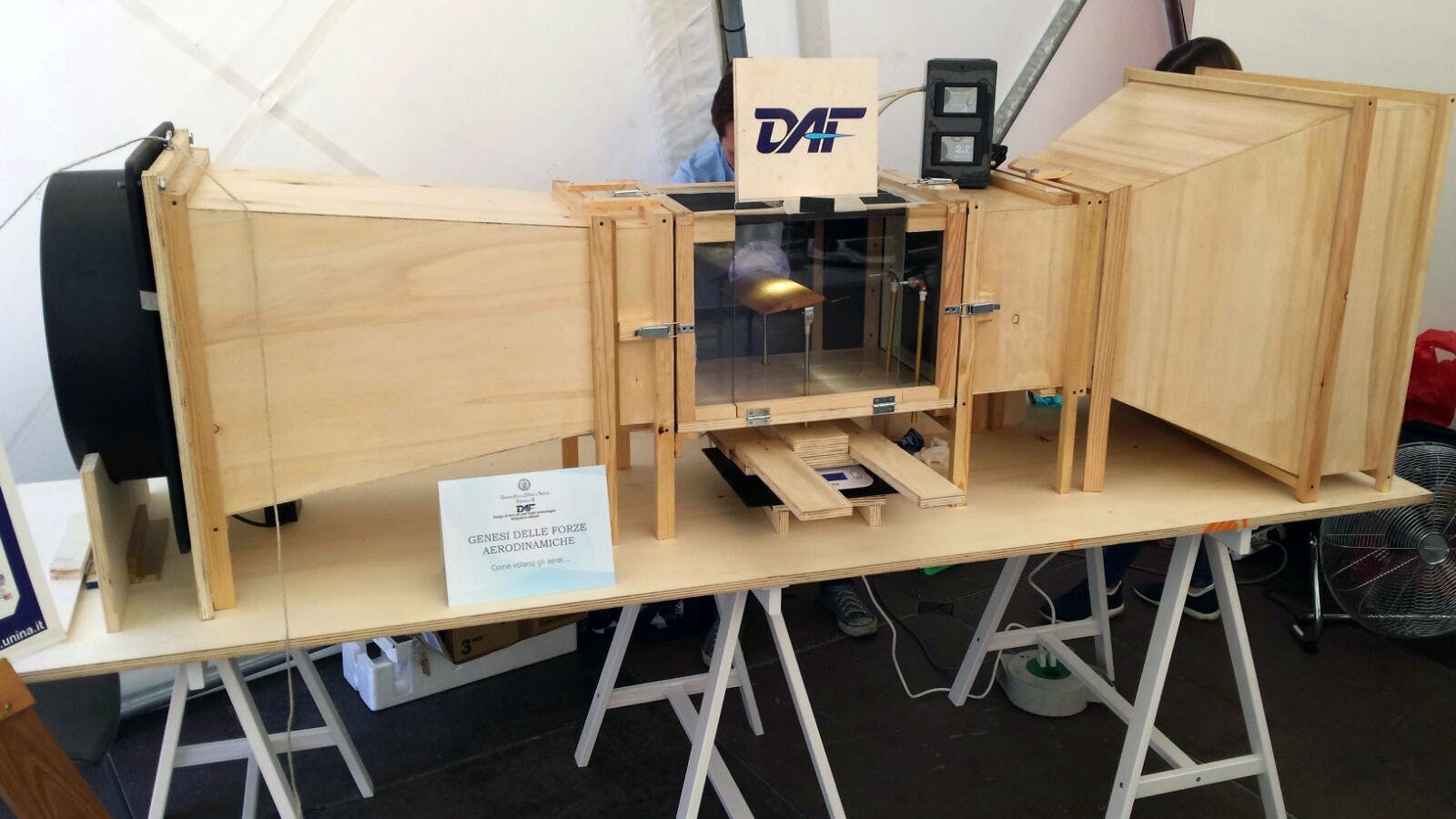
这个想法是实现一个仪表板来控制舵机并在液晶屏上显示角度和扫描模式。尽管确实存在专用于伺服测试的紧凑且便宜的板,但我想实现一种设备来控制和显示机翼模型的襟翼偏转,在一个小的教学风洞中,我想尽可能地做到Arduino 入门套件随附的物品。
这个怎么运作
通常,伺服测试仪可以通过旋转旋钮来控制伺服角度,将伺服置于中间位置,并在最小和最大角度位置之间自动扫描。由于我的目标是为机翼攻角变化或控制面偏转提供用户界面,因此我不需要将舵机置于中立位置(即 90°,如果舵机在 0° 和 180° 之间旋转),但我需要一个开关来设置参考零角度。事实上,当机翼(或控制面)相对于风的角度为零时,舵机可能处于任何位置。另外,我有兴趣测量控制面相对于参考零的偏转。最后,我希望伺服系统以我想要控制的特定角速度在围绕参考零的两个给定角度之间自动扫描,
在我的例子中,我使用了一个带有 JR 连接器的小舵机,我假设襟翼角度等于舵机角度(这是一个粗略的估计),并且自动扫描功能设置在 -30° 和 +60° 之间(正值,表示升力增加:襟翼向下旋转,空气动力向上增加。
面板以两种模式运行:手动控制和自动扫描。用户界面提供三个按钮、一个旋钮和一个 LCD 屏幕。显示屏显示手动控制模式下的伺服角度和自动扫描模式下的限制角度(在 Arduino 代码中设置,不可从面板编辑)。开关按钮用作参考角度归零,手动控制和自动扫描模式之间的切换,以及改变 LCD 显示屏上报告的角度符号。事实上,由于伺服旋转可能与所需的约定相反,最后一个开关按钮可以改变屏幕上的符号,但不会反转与旋钮旋转相关的伺服旋转。在手动控制模式下,舵机旋钮控制舵机角度,显示在液晶屏上。最初,显示屏显示舵机绝对角度,归零后显示相对于零的舵机角度。在自动扫描模式下,伺服旋钮通过调整连续旋转之间的延迟(15 到 100 毫秒之间)来控制旋转速率。
最后说明
我设法使用了 Arduino 入门套件中的物品,除了更大的面包板。由于组装原因,最终图片中显示的面板与面包板方案的排列略有不同。根据设备的电压和功耗,考虑到您可能需要外部电源来控制舵机。如果伺服振动,请检查您的连接,然后尝试添加外部电源。您可能需要重新排列面包板上的某些项目。
虽然不正确,但我保留了代码文件名、变量和显示语句的原始名称。迎角,α,AOA 是同义词,定义为参考线与纵向平面中风向之间的角度。在我的应用中,我改变了控制面的偏转角,这也改变了攻角,通过改变由于上下机翼表面之间的压力差引起的局部风向。显示屏上的 AOA 是指伺服角位置,它与连杆系统的控制面偏转有关。操纵面偏转引起的迎角和升力的变化与操纵面的有效性有关。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





