
资料下载


×
无人机以火攻坚开源硬件
消耗积分:0 |
格式:zip |
大小:4.85 MB |
2023-07-03
罗星
分享资料个
描述
- 该项目的重点是在发生灾难(如火灾)时跟踪人员,以及划定和识别火灾随着时间的推移延伸了多少,旨在将这些数据提供给相关当局并采取更快的行动来对抗这一事件。这一切都在无人机的帮助下。作为附加,识别某些无人机的飞行员,只是为了知道谁负责什么设备,因为在险恶的情况下,可能会有不止一架无人机,因此会有更多的飞行员。
- 我决定建立这个项目是为了开发有助于在必要时减少损失的技术。在过去的十年中,我们看到了洪水、地震等自然事件的显着增加,同样,人类可能会或不会发生的事件就像火灾一样,往往会消耗重要的土地区域。
- 构建过程中的图像:
- 无人机已经成为对抗这些事件的主要角色,这要归功于易于使用、达到人类无法达到的点以及硬件和软件技术的持续发展,就像我们使用的套件一样这场比赛。Yoy 可以根据您希望识别的对象类别在一些著名的网络中进行选择。此外,我们可以使用配套计算机与我们的自动驾驶仪对话以执行任务或处理与外部世界的其他类型的信息。(附上代码)。主要问题是无人机的重量,这使其飞行一时不稳定。当然,这可以通过 PID 调节来解决。另一个问题是,在一次测试中,我失去了无人机的支持,因此完全不可能重新测试。但是,到目前为止,我对项目的结果非常满意。改进肯定会到来。
- 对于与 FMU 的配套计算机连接,我使用了 FTDI 电缆。Jetson Nano 和 TELEM2 通过 USB 连接到 FMU。通话速率为 921600 波特。对于从 Nano 到计算机的连接,我使用了一个 USB Wifi 加密狗,它允许我使用热点对 jeton nano 进行 ssh。这样我就启动了 nano 上的所有脚本。这个 Jetson 热点也可用于提供连接,以防在险恶地区发现的人们无法直接到达自治领地
- RapidIoT 仅用于显示从其上的传感器读取的一些数据的值,以及来自 FMU 的一些 MAVLIK 消息。连接是通过 RapidIot 上的 UART 和 FMU 中的 TELEM2 建立的。
现在一些最终构建的照片:
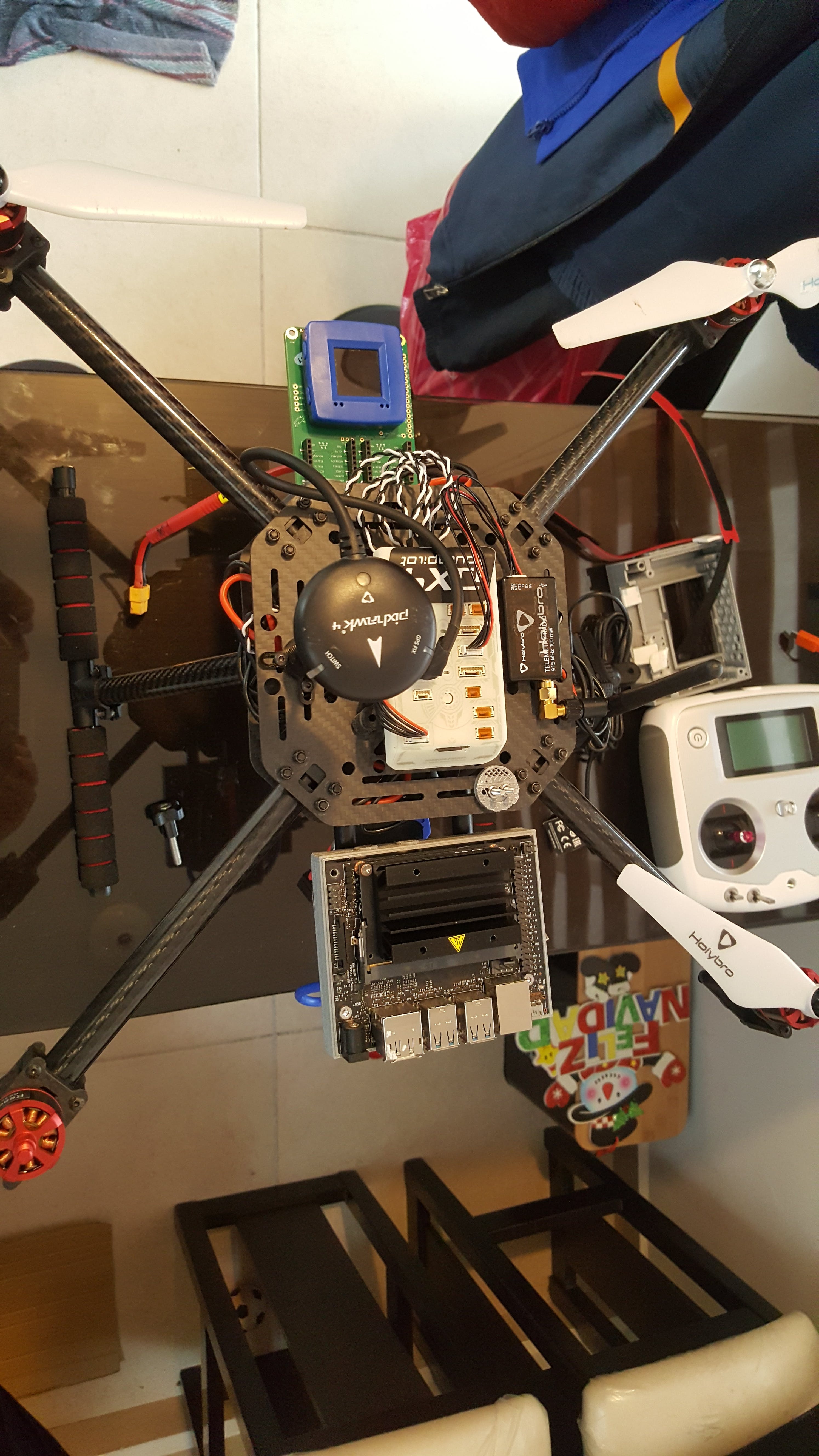
1 / 10
在这张图片中,没有看到 PixyCam,因为就在照片之前,PixyCam 在一次测试崩溃中崩溃了。
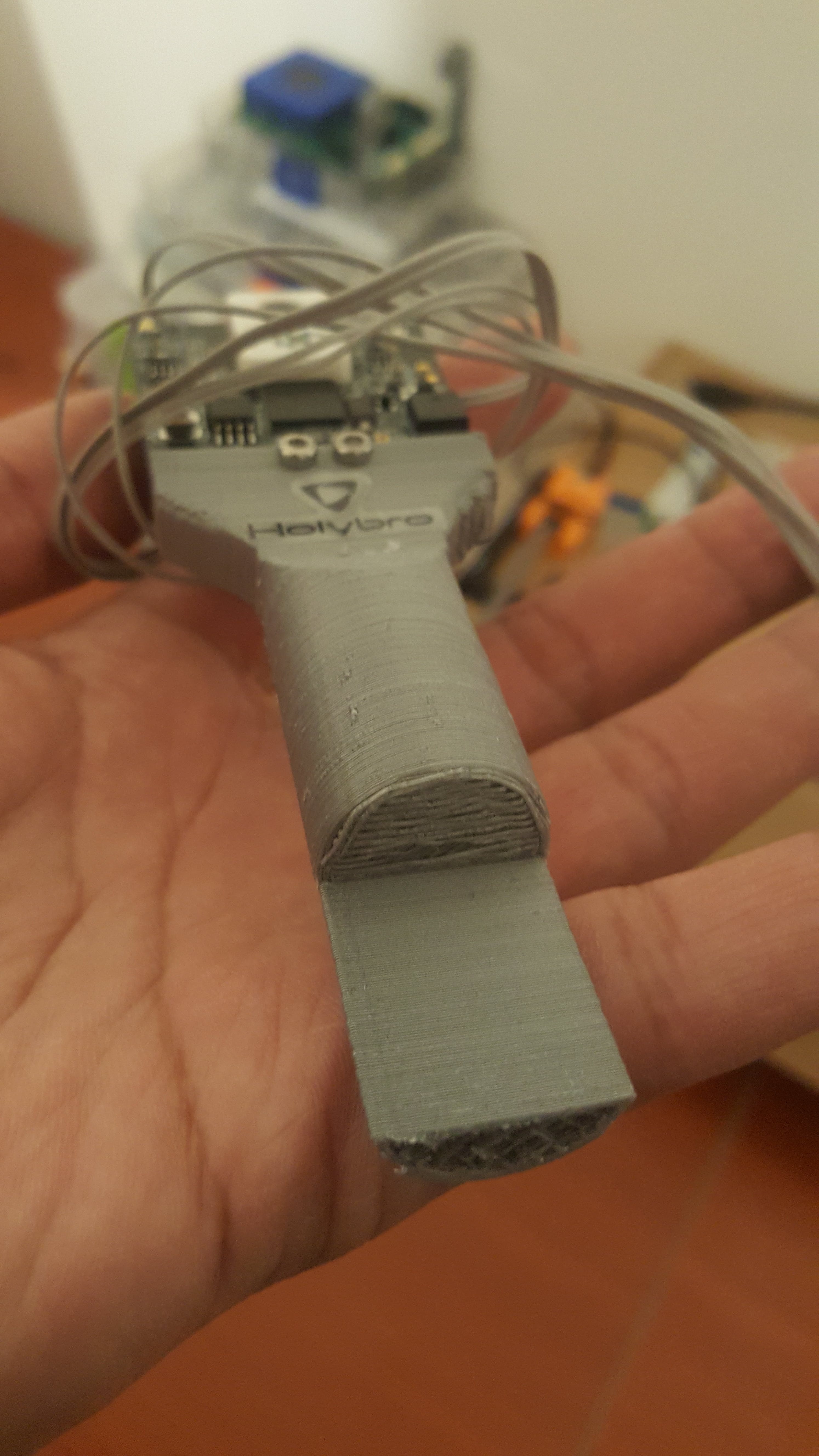
1 / 2 •损坏的 Pixy 底座
- 。这可以通过 Nvidia Digits Platform 完成,它使我们能够快速训练网络进行图像分类、分割和对象检测。我会选择这个选项,因为它可以与 jetson 推理库一起工作以导出网络并执行对象检测和分割,如下所示:
1 / 2 •烟雾分割示例

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





