

如何进行高维旋转
描述
作者:Eugene Wang
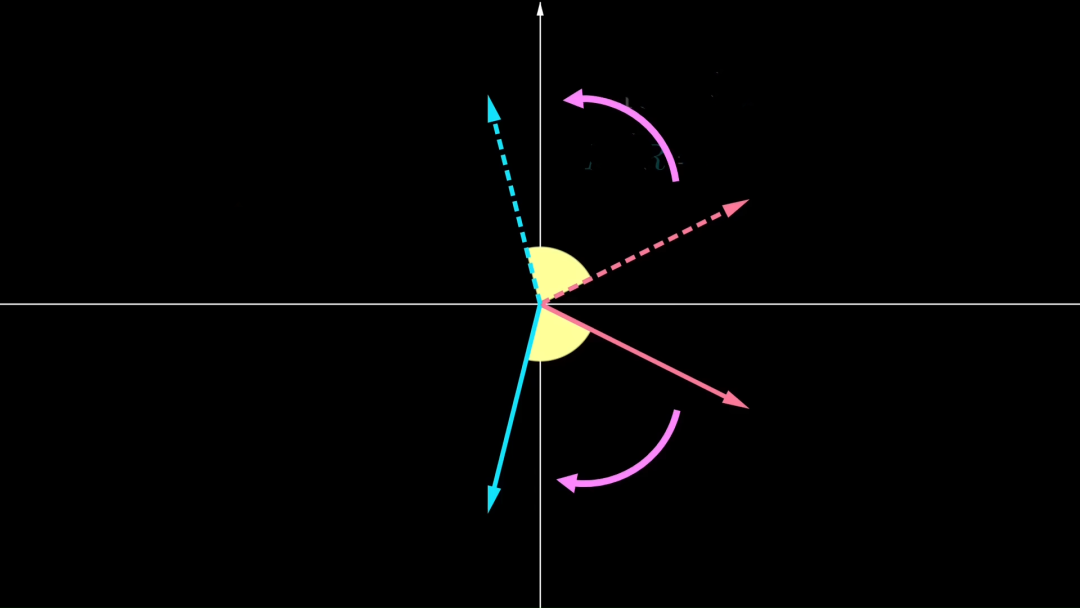
如果我们想要对二维矢量进行旋转,我们需要知道旋转点和旋转角度。如果要进行三维旋转,我们需要指定旋转轴和旋转角度。那么,我们可以进行四维旋转吗?或者说,我们可以进行更复杂的旋转吗?事实上,我们可以将其简化为,有一个n维向量,然后将这个向量旋转到另一个n维向量,我们将用更系统的方式来表达旋转。
首先,我们先来看看旋转的一些性质。第一个性质是旋转是线性变换,这种线性意味着两个方程: 和 。如果你在二维平面画出这些向量,你就可以验证它们。
由于旋转的线性属性,我们可以把旋转写成矩阵的形式:n维向量的旋转等于旋转矩阵R乘以n维向量。剩下的目标就是找到旋转矩阵R,使得 。
接下来,我们要来讲旋转的第二个性质:如果我们只是单纯旋转,向量的长度和向量之间的角度应该保持不变。这一性质意味着,两个向量的点积在旋转前后保持不变。也就是说,如果原来是v·w,那么两个向量旋转后就变成了Rv·Rw,两个点积是相等的: 。
对于实数向量,我们也可以将点积写为第一个向量的转置乘以第二个向量: 。我们也可以将等式右边进行一下变换,就可以得到 。因为这对于所有的向量v和w都是成立的,所以中间的 就是单位矩阵 。
因此,归结起来第二个性质就是满足 的旋转矩阵,我们把满足该性质的所有矩阵的集合表示为 ,O代表正交,n代表矩阵R的阶。
然而,长度和角度保持不变不仅仅只有旋转能做得到,反射也能做到这一点。因此,与反射对应的矩阵也将是属于O(n)的。所以,我们需要旋转的第三个性质,即它不会改变顺序。我的意思是,假如原本从向量v到向量w是逆时针,那么经过反射后就变成了顺时针,而旋转却不会做出这样的改变。因此,根据线性代数的知识,我们知道旋转矩阵R的行列式应该为正的,所以 。
因此,如果一个矩阵已经属于O(n),并且它的行列式为1,那么它就属于SO(n): 。这里的S代表特殊的,对应于行列式为1的附加要求。
以上的讨论都是针对实向量,如果我们要旋转复数向量的话,我们只要稍微进行修改就行。首先,我们把旋转矩阵R替换成矩阵U,它们之间的区别是U是一个复矩阵。其次,从第二个性质我们得到了 ,现在我们要把它改成 ,其中 意味着我们除了转置之外还取复共轭。最后,我们还有: 和 。
这样一来,我们就将旋转推广到了更高的维度和复数。虽然这些旋转矩阵很难直接去求解,但幸运的是,这些矩阵的集合,无论是O(n)、SO(n)、U(n)还是SU(n),都会形成称为李群的东西,这些都可以通过李理论去求解。
编辑:黄飞
-
如何进行编程,进行逆变器仿真2013-01-08 0
-
ISP是如何进行烧录的?2021-10-11 0
-
如何进行Bootloader烧录?2021-10-28 0
-
旋转编码器如何进行编程?2022-01-21 0
-
如何进行开关电源变压器的设计2017-09-07 831
-
实例介绍说明如何进行半桥变压器设计2017-09-07 1545
-
如何进行LED高速旋转显示屏的设计详细资料免费下载2018-10-18 919
-
如何进行程序的扩展2019-04-26 921
-
如何进行OPCDCOM配置2021-09-18 624
-
如何进行FFT IP配置和设计2022-07-22 1894
-
如何进行电源设计 - 第1部分2022-11-02 294
-
PowerLab 笔记:如何进行分立式设计2022-11-07 312
-
绝对值编码器之单圈值型编码器和多圈值型编码器之间的区别及在回程传感器上如何进行大臂水平旋转角度测2023-03-22 1998
-
直线模组如何进行精度校准?2023-08-01 779
全部0条评论

快来发表一下你的评论吧 !
