
资料下载


对多轴平面机器人的控制st10f276指南
hopehit
分享资料个
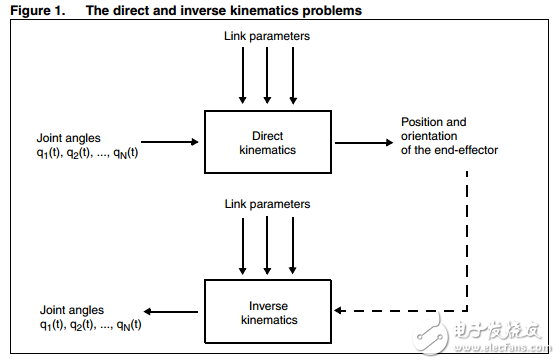
Kinematics analysis Robot arm kinematics deals with the analytical study of the geometry of motion of a robot arm with respect to a fixed reference coordinate system as a function of time without regard to the forces/moments that causes the motion. Thus, it deals with the analytical description of the spatial displacement of the robot as a function of time, in particular the relations between the joint space and the position and orientation of the end-effector of a robot arm. In kinematics, we consider two issues: 1. Forward analysis: for a given manipulator, given the joint angle vector q(t)=(q1(t), q2(t), …。, qN(t))T and the geometric link parameters, where n is the number of degrees of freedom, what is the position and orientation of the end-effector with respect to a reference coordinate system? 2. Inverse analysis: given a desired position and orientation of the end effector and the geometric link parameters with respect to a reference coordinate system, can the manipulator reach the desired manipulator hand position and orientation. And if it can, how many different manipulator configurations will satisfy the same condition?

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





