
资料下载


VR光学定位技术及VR定位动作捕捉技术的难点分析
分享资料个
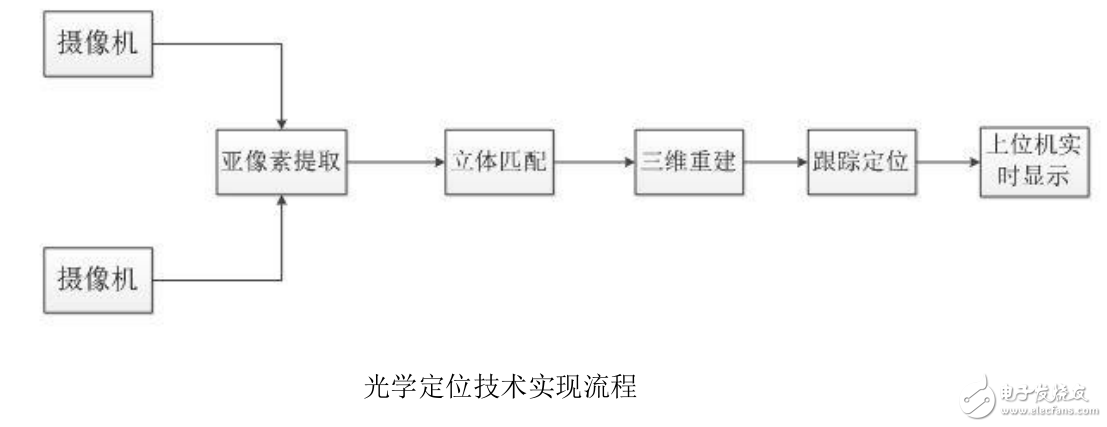
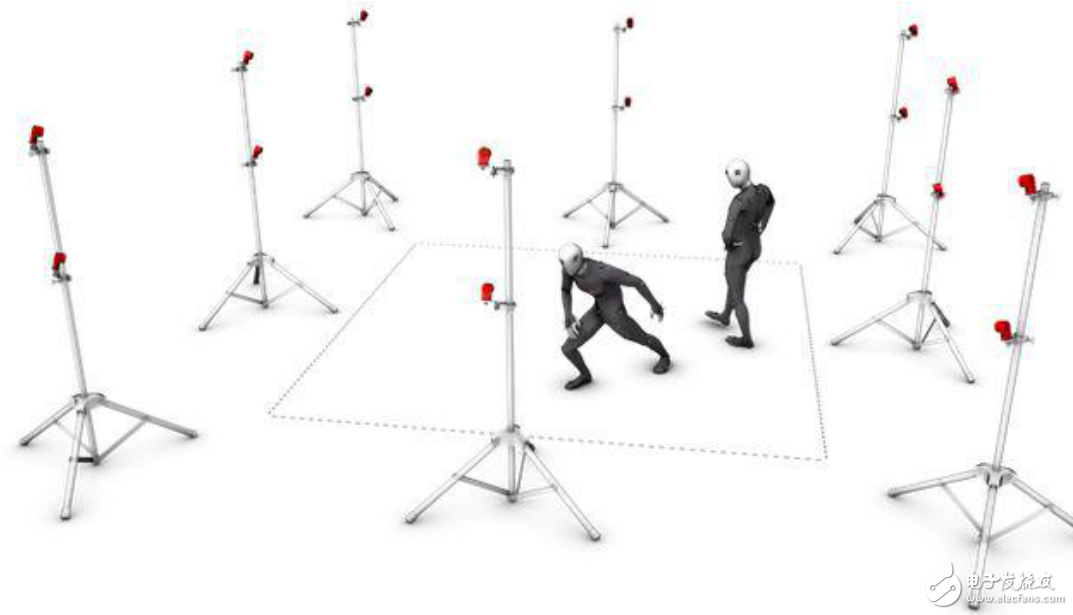
(1) 光学定位技术 VR 中的光学定位技术是利用摄像机拍摄目标物体,根据得到的目标图像及摄像机自身的位置信息推算出目标物体的位置及姿态等信息。根据标记点发光技术不同,光学定位技术还分为主动式和被动式两种。具体实现流程:定位物体上布满标记点,标记点可以自主发射光信号或者反射定位系统发射来的点信号,使得摄像头拍摄的图像中标记点与周围环境可以明显区分。摄像机捕捉到目标物上标记点后,将多台摄像机从不同角度采集到的图像传输到计算机中,再通过视觉算法过滤掉无用的信息,从而获得标记点的位置。该定位法需要多个 CCD 对目标进行跟踪定位,需要至少两幅以上的具有相同标记点的图像进行亚像素提取、匹配操作计算出目标物的空间位置。实现流程图如下:
目前,光学定位技术在国际上最受认可的是 Optitrack。OptiTrack 定位方案适用于游戏与动画制作,运动跟踪,力学分析,以及投影映射等多种应用方向,在 VR 行业有着非常大的影响力。
(2)惯性动作捕捉陀螺仪的工作原理是通过测量三维坐标系内陀螺转子的垂直轴与固定方向之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态。
它的强项在于测量设备自身的旋转运动。陀螺仪用于姿态捕捉,集成了加速度计和磁力计后,共同应用在惯性动作捕捉系统。惯性动作捕捉系统需要在运动物体的重要节点佩戴集成加速度计,陀螺仪和磁力计等惯性传感器设备,传感器设备捕捉目标物体的运动数据,包括身体部位的姿态、方位等信息,再将这些数据通过数据传输设备传输到数据处理设备中,经过数据修正、处理后,最终建立起三维模型,并使得三维模型随着运动物体真正、自然地运动起来

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






