
资料下载


×
机器人手臂控制系统的视觉识别部分介绍与硬件设计
消耗积分:0 |
格式:rar |
大小:0.3 MB |
2017-09-20
分享资料个
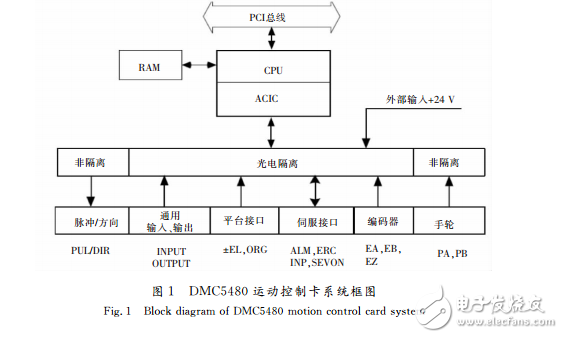
机器人手臂控制系统硬件设计2.1 DMC5480运动控制卡的概述实验中根据控制臂下棋的动作功能需要采用3自由度的运动方向,即空间坐标系X,Y,Z 轴。同时应该满足高速运动,速度可调,运行稳定,具有一定的智能化,后期扩展性强等优势。因此选用 DMC5480运动控制卡,DMC5480是一款基于 PCI总线的高档脉冲式运动控制卡,该产品不但采用了雷泰公司自主研发的运动控制专用芯片(ASIC),还增加了 CPU 和 RAM,并配置了512段缓冲,使得实时处理能力更强;同时在先进的轨迹规划软件支持下,实现了运动前瞻控制,使其高速轨迹控制性能十分优秀。DMC5480还具有许多其他高级功能,如:在电机运动过程中,程序可以根据不同的条件修改该运动过程的速度和目标位置;可以设置不同加速度、减速度的梯形、S形速度曲线。具体硬件系统框图如图1所示。
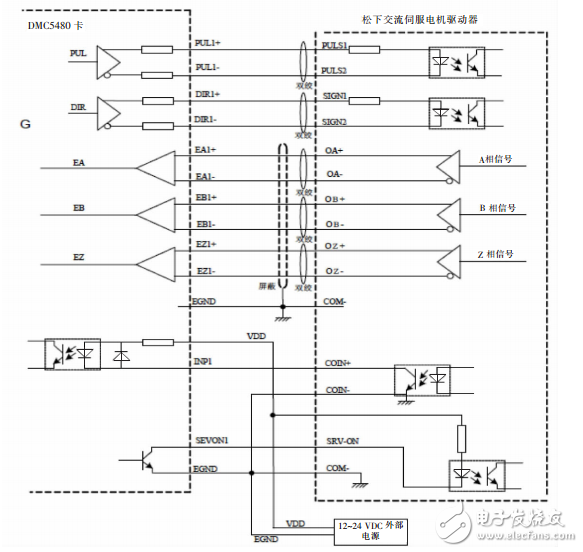
控制系统硬件连接DMC5480与交流伺服电机驱动器的连接图如图2所示。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




