
资料下载


×
基于PLC机器人系统设计研究
消耗积分:0 |
格式:rar |
大小:3 MB |
2017-10-02
分享资料个
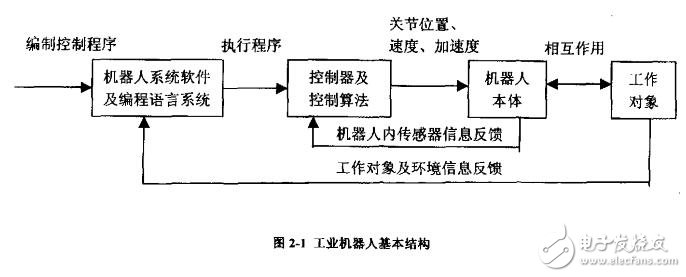
在工业自动化领域,可编程控制器(PLc)、机器人和CAD/CAM成为自动控制的三大技术支柱,住现代上业中发挥着巨大的作用。目前工业机器人由设计开发到应用已经相当普及,且绝大部分采翊交流伺服驱动系统,控制器往往采片j基于PC或DSP的嵌入式控制器。但是,随着PLC技术的快速发展,特剐是运动控帝0和网络功能的加强,PLC已经能够实现对机器人的控制,圊此对基于PLC控制的工业机器人系统进行研究并实现运动控制就显得十分必要。本文首先对下业机器人的总体结构和设计要求进行分析,完成了其结构设计。对伺服控制系统和工业机器人驱动特点进行了论述.确定T业机器人驱动采用全数字交流伺服控制系统,并完成了倒服电机和驱动器的选择。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




